Диагностика без использования дилерского RENAULT CAN CLIP (часть 3) — Разное — РАЗНОЕ — Руководства по ремонту
Диагностика своими руками, без использования дилерского RENAULT CAN CLIP (часть 3)
В данной части я покажу вам еще одну возможность программного комплекса PyRen, которую невозможно переоценить. Многие из нас есть в автомобиле со смартфоном/планшетом и иногда бывает нужно быстро и наглядно оценить либо помониторить тот или иной параметр, построить график.
Вернуться к ЧАСТИ №1
Вернуться к ЧАСТИ №2
Ну а некоторые так вообще не прочь бы иметь перед глазами целую доску дополнительных приборов, словно в самолете. Конечно, все это может PyRen, но каждый раз копаться в разделах «SY : System state», «SP : System parameters» и «LC : System configuration» выискивая тот или иной параметр не очень удобно!
В этом случае на помощь к нам приходит замечательная и юзабельная программа Torque Pro v1.8.154. На текущий момент это последняя версия, за обновлениями следите здесь.
Для того, что бы было даже чайнику поясню: все общение с ЭБУ автомобиля построено на основе команд, кодов и цифр (значений). Каждый параметр автомобиля и их сотни зашифрован условным кодом-идентификатором, например «PR071», на техническом сленге — PID. Следовательно зная нужный нам PID, можно отправить команду на ЭБУ и обратно получить ответ в виде текущего значения запрашиваемого PID-а. Все вроде бы просто, но беда в том, что полученный нами параметр на первый взгляд не будет иметь ничего общего с тем, что мы ожидаем.
На деле например, для PID-а температуры охлаждающей жидкости, мы можем получить некую условную цифру «2», которую не понятно как и в каких единицах измерения интерпретировать. Все дело в том, что сам номер PID-а, как и формула для преобразования его значения (например «НАПРЯЖЕНИЕ ПИТАНИЯ КОМПЬЮТЕРА», «PR071», «222005», «(1.0*(((A*256+B)&65535)))/100», «0», «0», «V», «7E0») являются интеллектуальной собственностью Renault и держатся в строгом секрете, это объясняется дороговизной профессиональных диагностических комплектов, производители которых имеют доступ к этой информации.
Так вот программа Torque Pro v1.8.154 хороша тем, что может работать как со стандартными наборами PID-ов, так и с пользовательскими, теми которые вы есть подсунете, да и к тому же по ним может вести логирование, строить графики, заменять бортовой компьютер и многое другое. Так где же нам взять эти наборы специальных PID-ов для моего автомобиля спросите вы? Ответ: все они находятся в уже доступной базе Renault CLIP v1.66, с которой может работать программный комплекс PyRen.
Для того что бы вытянуть из базы нужные PID-ы для своего автомобиля выбираем файл «make_torque_pids. py» и нажимаем на этот раз пиктограмму «окна» для запуска скрипта.
py» и нажимаем на этот раз пиктограмму «окна» для запуска скрипта.
На просьбу ввести идентификатор ECU, вводим требуемый номер блока, для которого вы хотите выгрузить PID-ы, нажимаем «ВВОД», после чего вводим язык «RU» на котором требуется выводить текстовые комментарии и снова нажимаем «ВВОД».
Напоминаем список номеров блоков для дизельного DUSTER ph3 в Luxe комплектации:
11108 — СИСТЕМА ВПРЫСКА
11469 — АБС
11432 — ПАНЕЛЬ ПРИБОРОВ (П/ПАН)
11335 — ЦЭКБС
11342 — П. БЕЗ./УС. ПР. Н.
11073 — УСИЛ. РУЛ. УПР.
11260 — ПОЛНЫЙ ПРИВОД 4 х 4
После выполнения работы скриптом будет выдано уведомление, что требуемый набор PID-ов для данного блока сохранен в папке «.torque/extendedpids» на вашей карте памяти смартфона. Если такой папки не существует либо по каким-то причинам сохранение в нее невозможно набор PID-ов будет сохранен в рабочую папку PyRen по пути «scripts/pyren99». Кроме того в папке «.torque/venicles» будет создан файл профиля вашего автомобиля для программы Torque Pro. Данную операцию проводим со всеми блоками вашего автомобиля.
Данную операцию проводим со всеми блоками вашего автомобиля.
Ниже выкладываю готовые наборы PID-ов для дизельного DUSTER ph3 в Luxe комплектации:
11108 — СИСТЕМА ВПРЫСКА
11469 — АБС
11432 — ПАНЕЛЬ ПРИБОРОВ (П/ПАН)
11335 — ЦЭКБС
11342 — П. БЕЗ./УС. ПР. Н.
11073 — УСИЛ. РУЛ. УПР.
11260 — ПОЛНЫЙ ПРИВОД 4 х 4
Далее устанавливаем программу Torque Pro v1.8.154 для Android. Копируем все наборы PID-ов в папку по пути .torque/extendedpids, если папки extendedpids
Запускаем Torque Pro v1.8.154, после чего в главном окне программы нажимаем на пиктограмму шестерни и входим в настройки программы.
Первым делом устанавливаем Bluetooth тип подключения к адаптеру.
В том же меню настроек адаптера OBD выбираем наше Bluetooth устройство.
В разделе основных настроек меняем количество экранов для режима приборной панели на нужное вам. Лично мы не любим выводить кучу ненужных мне PID-ов, только самые необходимы и все они умещаются на 3-х экранах. Все остальные настройки можете изменять по своему вкусу.
Лично мы не любим выводить кучу ненужных мне PID-ов, только самые необходимы и все они умещаются на 3-х экранах. Все остальные настройки можете изменять по своему вкусу.
После чего приводим все единицы измерения в соответствии с метрической системой, все как в базах CLIP.
Далее в разделе управления дополнительными PID поочередно добавляем наборы, которые мы экспортировали скриптом PyRen. Все блоки добавлять не обязательно, только те, что вам нужно.
Так как некоторые из PID-ов в разных блоках дублируются программа спросит, что делать с дубликатами (вы их можете заменить либо пропустить), нажимает «KEEP». Даем программе немного подумать, так как добавляется большой массив данных.
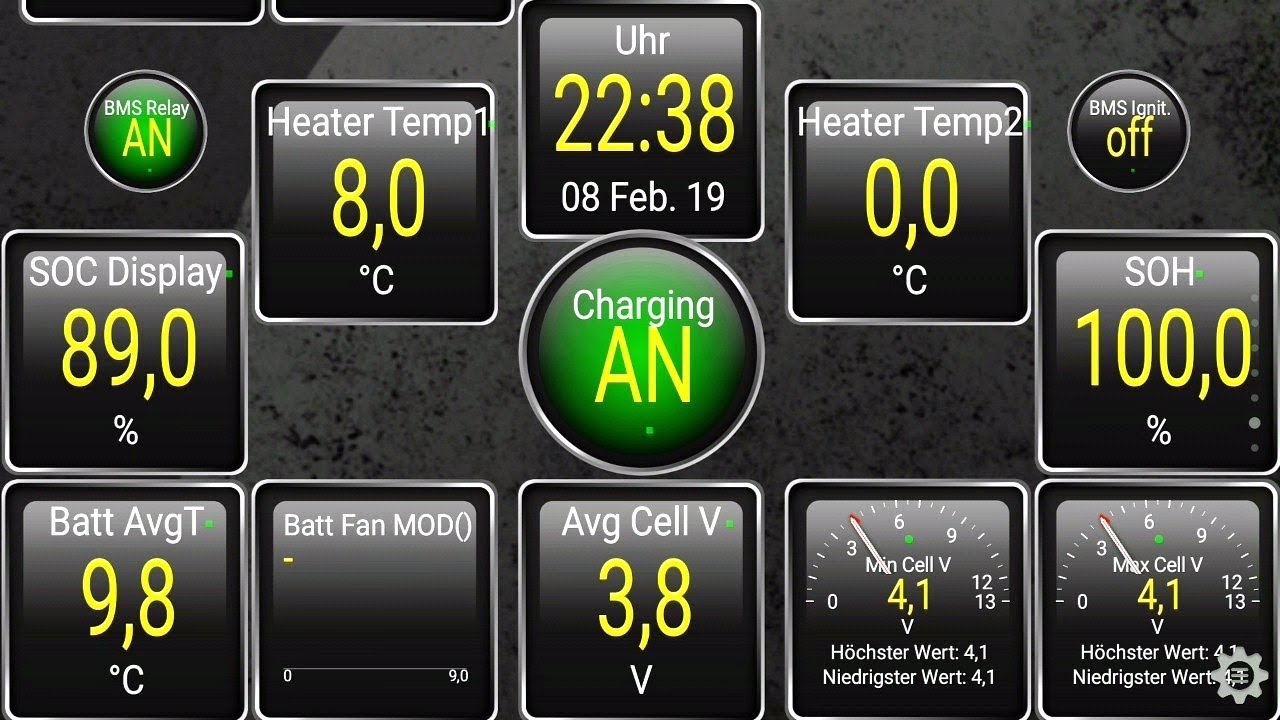
Возвращаемся в главное окно программы и запускаем плагин «Приборная панель». На нем вы можете наблюдать стандартные комбинации приборов (в данном случае это мои) на 3-х экранах, которые мы установили в настройках выше и которые в последствии можно удалить.
Удерживая палец на свободном черном участке экрана либо на новом экране добавляем новый прибор. В процессе нам будет предложено выбрать наиболее подходящий дизайн индикатора, его размер и требуемый PID — все настройки дизайна и положения индикатора можно будет в случае чего поменять в последствии.
Нажав и удерживая палец на приборе вы можете произвести любые действия с его дизайном, названием, задать пороги предупреждения, уровни наложения одного на другой, его расположение на экране и пр. Не размещайте кучу индикаторов на одном экране, лучше разделить все на несколько экранов: один для температурных датчиков, другой для давления и т.д.
Для записи логов с целью их последующего анализа потребуется зайти в раздел настроек «Запись и выгрузка журналов» и выбрать PID который нужно записывать. Вы можете выбрать несколько PID-ов для записи одновременно, но учтите, что данные о них будут поступать с некоторой задержкой, пока адаптер произведет опрос у ЭБУ по каждому их них. Для логов обычно выбирают запись 2-3 параметров за раз не больше.
Для логов обычно выбирают запись 2-3 параметров за раз не больше.
Для начала записи лога, после завершения соединения с ЭБУ (синяя машинка сверху не должна мигать) нажмите шестеренку в плагине приборной панели и выберите пункт «Начать запись». Для остановки проделайте подобную процедуру. Все записанные логи будут храниться в папке «torqueLogs» на вашей карте памяти смартфона.
Кроме того, программа Torque Pro позволять считывать и стирать ошибки записанные в памяти ЭБУ, но учтите, что читает она далеко не во всех блоках и далеко не все ошибки. Кроме того дает крайне скудное описание о проблеме, а зачастую и вовсе описание не соответствующее действительности. Поэтому для диагностики ошибок я рекомендую использовать средства PyRen.
Еще программа умеет строить графики в реальном времени с возможностью масштабирования и сохранения в виде картинки. Для этого нужно запустить плагин «Графики», выбрать тип графика, максимальное количество записей отраженных на графике, интервал записи в миллисекундах и собственно сам PID по которому его строить.
Ну и последнее на что мы бы хотели обратить внимание — это профиль машины. Данная функция может понадобиться тем, у кого в автомобиле нет бортового компьютера, в этом случае программа все может делать за него. Тут есть один существенный минус: вам всегда перед началом поездки придется запускать Torque Pro и вводить данные о заправках, иначе подсчет будет некорректным. Для создания профиля автомобиля в главном окне программы нажмите шестеренку и выберите пункт «Профили», заполните все поля и сохраните изменения. Помните, в самом начале статьи PyRen кроме набора PID-ов создал еще и файл профиля? Именно этот профиль и используется здесь, хранится этот файл с профилем в папке «. torque/venicles».
torque/venicles».
Перейти к ЧАСТИ №4
Выражаем благодарность rudder66
Блог на Драйве — drive2.ru/users/rudder66/
Строки инициализации ELM327
- Строки инициализации ELM327
Некоторые автомобили не на 100% совместимы с OBD2, но программа Torque может связываться с ними, если адаптер ELM327 настроен определенным образом.
Строка инициализации позволяет вручную настроить адаптер ELM327 для связи с такими транспортными средствами. Если вы не можете соединиться с блоком управления автомобиля в автоматическом режиме, возможно вам потребуется ввод строки инициализации.
Как добавить строку инициализации в программу диагностики
Итак, давайте разберемся, как заставить адаптер ELM327 работать с нужной нам строкой инициализации.
- Сначала нужно найти нужную строку инициализации в представленном ниже списке.
- Заходим в программу Torque и создаем новый профиль.

- В настройках созданного профиля, в самом низу, пишем нашу строку инициализации, нажимаем кнопку сохранить.

Подключение ЯНВАРЬ 5.1
Для подключения к блоку управления ЯНВАРЬ 5.1 необходимо:
- Добавить Набор ПИДов для Январь 5.1 или Набор ПИДов для Январь 5.1 R83 в папку «.torque/extendedpids» (папка «.torque» может быть скрыта).
- Зайти в «Управление внешними пидами»,выбрать «Добавить набор» и выбрать добавленный набор.
- Прописать строку инициализации:
ATZ ATSP5 ATIB10 ATSH8110F1 ATSW00 3E01
или
ATSP5 ATIB10 ATSH8110F1 ATST10 ATSW00 - Открыть Приборная панель > долгий тап по экрану > Добавить прибор — выбираем свои датчики
Подключение ЯНВАРЬ 7.2
Для подключения к блоку управления ЯНВАРЬ 7.2 необходимо:
- Добавить Набор ПИДов для Январь 7.2 в папку «.torque/extendedpids» (папка «.torque» может быть скрыта).
- Зайти в «Управление внешними пидами»,выбрать «Добавить набор» и выбрать добавленный набор.
- Прописать строку инициализации atal atsp5 atib10 atsh8110f1 atst32 atsw00\atfi

Документацию по командам инициализации можно посмотреть в ELM_Docs
Перечень строк инициализации ELM327
- BYD F3
ATSP5 ATSH8111F1 ATSW00 - BYD F3 ABS
atsp5 atsh8128f1 atfi - Chery Tiggo Delphi system 2.0L/2.4L (4G63/4G64)
atal atsp5 atib10 atsh8011f1 atst10 atsw00 - Dacia Logan 1.4 2007 г.
ATSP5 ATSH817AF1 - Daihatsu Terios Kid 2002г
ATIB10 ATIIA10 ATSH8110F0 ATSPA5 ATSW00 - Delphi MR240
ATSP5 ATAL ATSH8111F1 ATWM8111F13E - Honda Хонда Аккорд 2.4 2009
atsp7 atshda1df1 - Hyundai Elantra, 2003г, 2л, АКПП
atsp5 atsh8111f1 - Fiat Pre-OBD
ATSH 8110F1 - GREATWALL Delphi MT20U2_EOBD
atal atib10 atsp5 atsh8111f1 atst10 atsw00 - Lifan Solano ABS (Mando)
ATSP5 ATSH8028F1 ATWM8028F1021081 ATFI - Lifan Solano ABS (Wanxiang)
ATSP5 ATSH8128F1 ATWM8028F1021080 ATFI - Mitsubishi MUT
ATSP0 ATAL ATIB10 - MK70 ABS (Geely и др. авто с таким блоком)
atal atsp4 atiia83 atsh8128f1 atst10 atsw00 - Nissan для внутреннего рынка Японии
ATSP5 ATAL ATIB10 ATSH8110FC ATST32 ATSW00 - Opel KWP2000
ATSP5 ATAL - OPEL Vectra Simtec 56.5
ATSP5 ATSH8111F1 ATSW00 - Renault Scenic RX4 2002 Diesel
atsp5\atal\atib10\atsh817af1\atst32\atsw00 - Renault Kangoo 1.5l DCI Блок управления DCM12
ATSP5 ATSH817AF1 ATSW00\10C0\ - Sagem2000
atsp5 atsh8110f1 atfi 3e - Siemens ACR167 KWP
ATSP5 ATAL ATSH8111F1 81 - Sirius D42
ATSP5 ATAL ATIB10 ATSH8211f1 ATST32 ATSW00 ATFI - SSANGYONG KYRON ISO 14230
ATSP5 ATAL ATIB10 ATSH8110F1 ATST32 ATSW00 - SsangYong 2.3 MSE бензин (Kyron,Rexton,Action,Musso,Korando)
atsp5 atib10 atsh8101f3 atst32 atsw00 - Suzuki Swift 2005 1. 5л АКПП
atsp5 atsh8111f1 - Tiggo Delphi MT20U
ATSP5 ATAL ATIB10 ATSH8111F1 ATST32 ATSW00 - Toyota Celica ZZT230
ATIB 96 ATIIA 13 ATSH8113F1 ATSP A4 ATSW00 - Toyota Caldina 1998 г
ATIB96 ATIIA13 ATSH8113F1 ATSP4 ATSW00 - Toyota Fielder 2005г
ATIB96 ATIIA13 ATSH8113F1 ATAL - Toyota Vitz 01.2002
ATSH8213F1 ATIB96 ATIIA13 - Toyota VITZ 1KR-FE 2009
atsp6\atsh7e0 - Toyota Hilux Pick Up 2006 г
ATIB10 ATIIA10 ATSH8110F0 ATSPA5 ATSW00 - Toyota Mark 2, Toyota Aristo 161
ATIB96 ATIIA13 ATSH8113F1 ATAL
ATIB96 ATIIA13 ATSH8213F1 ATE0 ATAL
ATIB96 ATIIA13 ATSH8113F1 ATSP4 ATSW00 - Toyota для внутреннего рынка Японии ISO9141
ATSP3 ATAL ATIIA33 ATIB10 ATSH686AF1 ATST32 ATSW00 - Toyota для внутреннего рынка Японии Common
ATIB96 ATIIA13 ATSH8113F1 ATSPA4 ATSW00 - Toyota для внутреннего рынка Японии 10400baud
ATIB10 ATIIA13 ATSH8013F1 ATSPA4 ATSW00 - Toyota для внутреннего рынка Японии CAN mode21
ATSP6 ATAL ATSH7E0 ATCRA7E8 ATST32 ATSW00 - Toyota GT86
ATSP6 ATAL ATSH7E0 - Toyota Nadia/Harrier для внутреннего рынка Японии
ATIB10 ATIIA13 ATSH8013F1 ATSPA4 ATSW00
ATIB96 ATIIA13 ATSH8213F1 ATSPA5 ATSW00 - Toyota PRIUS NHW10
atsp4 atib96 atiia13 atsh8113f1 atsw00 - Toyota Sienta 1NZ-FE (CVT)
atspa4\atib96\atiia13\atsh8113f1\atst32\atsw00 - Toyota Allex 2002г 1nz-fe 4WD АКПП
atspa4 atib96 atiia13 atsh8113f1 atst32 atsw00 - Toyota Passo KGC1 (1KR-FE)
atsp5 atsh8110f0 atfi - Volkswagen Caddy 1. 9I 2006 дизель (KWP2000)
atsp5 atib10 atsh8110f1 atst10 atsw00 - ЛАДА Ларгус ABS
ATSP5 ATIB10 ATSH8101F1 ATST32 ATSW00 - ЛАДА Ларгус SRS
ATSP5 ATIB10 ATSH812CF1 ATST32 ATSW00 - ВАЗ Январь
ATSP5 ATAL ATIB10 ATSH8110F1 ATST32 ATSW00 - ВАЗ Январь 5.1.1
ATSP5 ATIB10 ATSH8110F1 ATST10 ATSW00 - ВАЗ Январь 7.2 Евро 2
atal atsp5 atib10 atsh8110f1 atst32 atsw00\atfi - ВАЗ Bosch MP7
ATSP5 ATAL ATIB10 ATSH8111F1 ATST32 ATSW00 ATFI - ВАЗ Bosch 797
ATFI ATAL - Микас 10.3 ZAZ Sens
atsp5 atsh8110f1 atfi
в настройках профиля поставить «исп. альтернативный ОБД заголовок», предпочтительный протокол ISO 14230 fast - УАЗ 1797
ATSP5 ATAL ATSH8110F1 ATFI - УАЗ Патриот Bosch m17.9.7
ATZ ATSP5 ATIB10 ATSH8110F1 ATSW00
 авто с таким блоком)
авто с таким блоком) 5л АКПП
5л АКПП 9I 2006 дизель (KWP2000)
9I 2006 дизель (KWP2000)PID (параметр идентификации данных) – код, посылаемый блоку управления ECU, однозначно определяемый параметр, который должен тот вернуть. Для разных автомобилей могут отличаться даже по годам.
Для разных автомобилей могут отличаться даже по годам.
Теперь надо разобраться как редактировать, просматривать и добавлять дополнительные PIDы в программу Torque.
1. Нужно найти и скачать на смартфон набор PIDов в формате csv, подходящий для вашего автомобиля. Некоторые из них можно найти в данной статье ниже по тексту.
2. Скачанный набор PIDов помещаем в папку .torque/extendedpids. Папка .torque находится в корне карты памяти или памяти телефона. Обращаем внимание, что эта папка является скрытой и чтобы получить к ней доступ необходимо включить отображение скрытых папок. На скриншотах все действия с файлами производятся файловом менеджере ES проводник, у вас может быть установлен другой.
Наборы PIDов:
Pid для torque renault | Авто Брянск
Привет друзья ! Сегодня речь пойдет о программе TORQUE PRO на данный момент это последняя версия)))
Эта программа может работать как со стандартными наборами PID- ов так и спользовательскими.
Разберем на примере что такое PID?
PID это параметр автомобиля зашифрован условным кодом-идентификатором, например «PR071» —PID.
Так где же нам взять эти наборы специальных PID-ов для моего автомобиля спросите вы? Ответ: все они находятся в уже доступной базе Renault CLIP v1.60, с которой может работать программный комплекс PyRen.
Для этого запускаем SL4A. и выбираем пункт make_torque_pids.ru Для того что бы вытянуть из базы нужные PID-ы для своего автомобиля.
После выполнения работы скриптом будет выдано уведомление, что требуемый набор PID-ов для данного блока сохранен в папке «.torque/extendedpids» на вашей карте памяти смартфона. Если такой папки не существует либо по каким-то причинам сохранение в нее невозможно набор PID-ов будет сохранен в рабочую папку PyRen по пути «scripts/pyren99». Кроме того в папке «.torque/venicles» будет создан файл профиля вашего автомобиля для программы Torque Pro. Данную операцию проводим со всеми блоками вашего автомобиля.
Данную операцию проводим со всеми блоками вашего автомобиля.
Запускаем Torque Pro v1.8.154, после чего в главном окне программы нажимаем на пиктограмму шестерни и входим в настройки программы.
Далее в разделе управления дополнительными PID поочередно добавляем наборы, которые мы экспортировали скриптом PyRen. Все блоки добавлять не обязательно, только те, что вам нужно.
Так как некоторые из PID-ов в разных блоках дублируются программа спросит, что делать с дубликатами (вы их можете заменить либо пропустить), нажимает «KEEP». Даем программе немного подумать, так как добавляется большой массив данных.
Возвращаемся в главное окно программы и запускаем плагин «Приборная панель». На нем вы можете наблюдать стандартные комбинации приборов .
PS Выкладываю готовые наборы PID-ов для двигателя К4М
Так получилось, что к юбилейной предновогодней записи БЖ машинки, подготовил большой подарок и всем её читателям.
Не буду утомлять введением и сразу дам ссылку на обновление PID для Torque:
K9K_832_and_836_v. 1.92.csv
1.92.csv
А теперь расскажу и покажу то, что реализовано этой версии. Наверное самое полезное, чего не хватало мне ранее, это информации о статусе трех реле проточного подогревателя ОЖ: выведены как каждое из трех реле, так и общий счетчик работающих свечей подогрева (с учетом того, что первое реле включает сразу 2 свечи). А также переведены названия переменных на русский язык.
Теперь будут скриншоты из CLIP. «Звездочками» отмечены переменные, доступные в этом наборе PID.
Датчики работают так:
«Для наглядности у приборов, которым не нужны значения после запятой, нужно
долгий тап на прибор -> настройки -> количество знаков после запятой, выставить ноль». Спасибо, подсказали на 4pda.ru
Нужно отметить следующие цифровые обозначения:
1. [K9K] Статус работы стартера
«0» = «cranking relay switched off»
«1» = «short relaxation active»
«2» = «long relaxation active»
«3» = «cranking relay switched on»
2. [K9K] Статус АКПП: 2-МКПП
[K9K] Статус АКПП: 2-МКПП
«0» = «forbidden»
«1» = «authorized»
«2» = «manuel gearbox»
«3» = «unavailable»
3. [K9K] ET774 Регулирование давления наддува
(замечал такие значения: 0 — без нагрузки, 1 — плавный разгон, 3 — резкий разгон, 2 — заглушили двигатель)
«0» = «openloop control»
«1» = «shut off for small engine speed»
«2» = «regulation»
«3» = «regulation «
«4» = «regulation «
«5» = «exhaust pressure limitation»
«6» = «Monitool activated»
«7» = «shut off because of governor deviation»
«8» = «shut off because of system error (s)»
«9» = «shut off because of cold start»
«10» = «exhaust pressure regulation because manifold air pressure sensor error»
«11» = «transient detection strategy»
«12» = «VNT protection»
«13» = «exhaust pressure sensor failure (limp home)»
«14» = «shut off because of exhaust pressure sensor disconnected»
«15» = «Pft upstream pressure limitation in case of exhaust pressure sensor failure»
«16» = «transient mode in case of exhaust pressure sensor failure»
«17» = «anti compressor surging mode»
4. [K9K] Статус регенерации сажевого фильтра
[K9K] Статус регенерации сажевого фильтра
«0» = «wait state»
«1» = «heating state»
«2» = «regeneration state»
«3» = «cooling state»
«4» = «Succesfull regeneration state»
«5» = «failure state»
5. [K9K] Уровень заполнения сажевого фильтра
«1» = «status de calcul 1»
«2» = «status de calcul 2»
«3» = «status de calcul 3»
«4» = «status de calcul 4»
И небольшое различие в единицах измерения, не критично, оставлю пока так:
[K9K] PR037 Давление хладагента и [K9K] PR038 Давление в топливной магистрали — показания в psi (фунт на квадратный дюйм) и для получения тех же bar, как CLIP, нужно умножить значение на 0.06894757293168.
PID (параметр идентификации данных, ПИД) — код, посылаемый блоку управления ECU, однозначно определяемый параметр, который должен тот вернуть. Для разных автомобилей могут отличаться даже по годам.
Теперь надо разобраться как редактировать, просматривать и добавлять дополнительные PIDы в программу Torque.
Как добавлять PIDы в Torque
- Нужно найти и скачать на смартфон набор ПИДов в формате «csv», подходящий для вашего автомобиля. Некоторые из них можно найти в данной статье ниже по тексту.
- Скачанный набор PIDов помещаем в папку «.torque/extendedpids». Папка «.torque» находится в корне карты памяти или памяти телефона. Обращаем внимание, что эта папка является скрытой и чтобы получить к ней доступ необходимо включить отображение скрытых папок. На скриншотах все действия с файлами производятся файловом менеджере «ES проводник», у вас может быть установлен другой.
- Написать «csv» файл проще, чем прописывать дополнительные ПИДы в ручную в программе. Можно воспользоваться блокнотом или любым текстовым редактором, Microsoft Excel вносит ошибки при сохранении файла, лучше пользоваться редактором notepad++
В файле «csv» первой строчкой идет шапка, вторая и последующие строки — это создаваемые ПИДы, структура записи которых аналогична шапке.
Синтаксис формул PID
Ответ ЭБУ обычно состоит из нескольких байт. Для обращения к определенному байту ответа используется буквенная адресация.
Для обращения к определенному байту ответа используется буквенная адресация.
A-1 байт ответа, B-2, C-3, …, Z-26, AA-27,AB-28.
Для составления формулы используются следующие операции:
A*10 — умножение
A/2.5 — деление
A+B — сложение
B-10 — вычитание
A
Torque Pro v1-8-94 — Диагностика на Android
В дополнение темы:
Torque Pro — лучшая программа для диагностики автомобилей с помощью Bluetooth-адаптера ELM327 + смартфоны / планшеты на Android. Программа предназначена для получения и отображения диагностической информации о работе двигателя и АКПП. Интерфейс Torque Pro имеет 7 настраиваемых экранов, которые позволяют отображать информацию в виде графиков, цифровых значений и шкалы.
О дополнениях:
PID files:
— BYD F3 ECU Delphi MT20U
— Citroen C4 2014
— Citroen C5 5FN 2011
— Chery Tiggo
— Chevrolet Daewoo Sirius D42
— Daihatsu Sirion — Toyota Passo
— Daihatsu Terios
— Ford Focus 2004 1. 8TDCi
8TDCi
— Ford Focus II
— Geely M7.9.7
— Geely MT20U2
— Geely ABS MK70
— GreatWall ECU Delphi MT20U2 + Lifan 620
— Honda Accord 2.4 2009
— Honda FIT GK3 2014
— Hyundai Elantra 2003 2.0
— KIA Venga 2010 diesel
— Lifan Solano ABS
— Land Rover Freelander II 2.2 SD4
— Land Rover Discovery III diesel 2.7
— Land Rover Discovery IV diesel 3.0
— Mercedes Benz W203 CDi 2005
— Mitsubishi Cedia GDI
— Mitsubishi Pajero 4 V93W 2010
— Mitsubishi Outlander 2008-2013
— Mitsubishi L200, new Pajero Sport
— Nissan Murano z51WOH
— Opel Combo-C 1.3 CDTi
— Opel Astra-K 1.6 2016
— Opel Multec S
— Opel Vectra B X18XE
— Opel Vectra Simtec 56.5
— Range Rover 3.6
— Renault Duster 2.0 2014
— Renault Duster 1.6 restyling
— Renault Duster 1. 5 dCi 2016
5 dCi 2016
— Renault Logan ECU EMS3132
— Renault Logan II, Sandero II
— Renault Kangoo 1.5 DCI 2008
— Renault Megane, Fluens
— Renault Megane II 2007 1.6 К4М
— Renault Sandero 2014
— Renault Scenic RX4 2002
— Renault Trafic 2
— Skoda Octavia
— SsangYong petrol 2.3 MSE
— SsangYong Kyron D20DT
— Suzuki Swift 2005
— Toyota Axio 2006
— Toyota Prius 2
— Toyota Prius 3
— Toyota Corolla 2002 diesel 2.0 1CD-FTV
— Toyota Cami K3-VE, Terios K3-VE, Duet EJ-DE, Terios EF-DEM
— Toyota Sienta ABS 1NZ-FE-CVT
— Toyota Vitz 1KRFE 2009
— VAG ECU EFI KW2089
— Volvo XC70 D5 2008
— VAZ ECU M7.3
— VAZ ECU Yanvar 5.1
— VAZ ECU Yanvar 5.1.1
— VAZ ECU Yanvar 7.2
— VAZ ECU Bosch MP7.0
— VAZ Largus ABS
— VAZ Largus SRS
— ZAZ Mikas 7. 6
6
— ZAZ Mikas 10.3
— UAZ Patriot ECU M 17.9.7
— UAZ diesel ZMZ 51432
Plugins:
— Infiniti 1.1
— Fiat 1.6
— Fuel Economy 1.5
— Hyundai 1.9
— KIA 1.4
— Mazda Speed 2007-09
— Mitsubishi MUT 1.1
— Mitsubishi 1.9
— Nissan 1.3
— Racing Meter 1.8.2
— Renault 1.1
— Track Recorder 1.6.60
Что в ахиве:
— Torque Pro v1.8.205
— PID files
— Plugins
Torque Pro + PID files + Plugins + Initialization string.7z
Полная инструкция Torque Pro на русском
Привет всем. Многим пользователям приложения просто необходима инструкция Torque Pro на русском, но как таковой её не существует. Приходится довольствоваться найденными статьями тех, кто уже пользовался набрав небольшой опыт.
В этом материале я также попытаюсь поделиться своим опытом использования программы Torque для устройств на Андроид, так как имею автомобиль и не раз проводил его диагностику.
Для тех, кто впервые столкнулся с этим приложением поясню. Эта программа работает на всех устройствах оснащенных операционной системой Андроид помогая считывать параметры бортового компьютера автомобиля в паре с устройством типа Smart Scan Tool Pro, Elm327 и других. Используя эти две штучки можно самостоятельно провести диагностику автомобиля, при необходимости сбросить ошибку.
Содержание
- Сканер Scan Tool Pro
- Подключение Scan Tool Pro и Torque Pro
- Настройка профиля
- Настройка приложения Torque Pro
- Приборная панель
- Проверка на ошибки
- Обзор на карте
- Результаты испытаний
- Графики
Сканер Scan Tool Pro
Прежде чем приступить к разбору приложения Torque Pro хотелось бы немного зацепить само устройство Smart Scan Tool, так как их появилось в последнее время много и по цене имеют приличный разбег. Названия у них могут быть разные, но принцип работы один.
Не стремитесь покупать дешевые китайские адаптеры, которые предлагает Алиэкспресс. Огромная вероятность того, что оно не будет работать вообще. Берите, там, где есть гарантия и продавец несет ответственность за свой товар.
Огромная вероятность того, что оно не будет работать вообще. Берите, там, где есть гарантия и продавец несет ответственность за свой товар.
Оригинальное устройство Scan Tool Pro или Smart Scan Tool Pro должно иметь микроконтроллер от канадских производителей, то что продают в России и странах СНГ это преимущественно Китай. Отлично работает Корейская сборка (ссылки на них в тексте). Основная масса устройств имеет более дешевый вариант микроконтроллера и различные прошивки, соответственно их стоимость низкая. Но я не хочу сказать, что они не будут работать. Они работают и довольно неплохо. Вам лишь остается подобрать то устройство, которое будет работать на вашем автомобиле, а может и не будет.
Есть информация, что считывание данных с компьютера автомобиля зависит от прошивки. И это действительно так. Приведу пример.
Моему автомобилю Шевроле Авео отлично подошло устройство с версией прошивки 2.1, но не захотело работать на автомобилях ВАЗ и Нисанн (на других моделях не пробовал).
Устройство с прошивкой 1.5 – 1.6 способно охватывать практически все модели автомобилей. Оригинальная прошивка, как утверждают производители, работает на любом автомобиле. В отличии от оригинала часть функций на “поддельных” устройствах утрачено, это не критично.
Стоимость устройства в первую очередь зависит от производителя и комплектации. Половина стоимости комплекта может тянуть поставляемый с устройством софт. Покупая комплект Smart Scan Tool Pro, мы тем самым обезопасим себя в плане синхронизации адаптера с устройством вывода данных, уж точно между собой они будут работать, как говорится “фирма гарантирует”.
Диагностика на компьютере с использованием программы Scan Master
Подключение Scan Tool pro и Torque Pro
Для того чтобы приложение Torque Pro начало сбор данных необходимо:
1. Найти разъем диагностики автомобиля, подключить сканер. Обычно он находится под панелью приборов или под рулевым колесом. На некоторых моделях он выведен на центр панели, между водителем и пассажиром. После подключения на адаптере должен загореться светодиод.
На некоторых моделях он выведен на центр панели, между водителем и пассажиром. После подключения на адаптере должен загореться светодиод.
2. Следующий этап, это подключение адаптера с телефоном. В этом шаге нужно включить Blutooth, активировать поиск. Как только, произойдет синхронизация в настройках смартфона появиться новое устройство OBDII.
Для старых прошивок 1.5 – 1.6, возможно, потребуется ввести пароль “0000”, “1234” или “6789”. В моем случае пароль не потребовался.
В дальнейшем эту процедуру проделывать не придется, после запуска приложения Torque, включится Blutooth и произойдет синхронизация устройств.
3. Повернув ключ зажигания (без запуска двигателя), переходите во вкладку на главной панели “Состояние адаптера”. Если все сделали правильно, то должны стоять четыре зеленых галочки.
- Blutooth включен (на обоих устройствах)
- связь с адаптером (устройства синхронизированы)
- подключение к ЭБУ (соединение с компьютером)
- счетчик ошибок
Но бывает и по-другому, когда одна из галочек не проставляется, чаще всего бывает отсутствие подключения к ЭБУ. Об этом говорилось выше, прошивка не видит компьютер.
Об этом говорилось выше, прошивка не видит компьютер.
Настройка профиля
Первым делом нужно настроить “Профиль”. Перейти для заполнения, редактирования профиля можно в верхнем правом углу экрана, тапнув на надпись.
Здесь необходимо заполнить некоторые параметры:
- Название профиля (любое)
- объем двигателя (реальный)
- полную массу автомобиля (по паспорту)
- тип топлива
- объем топливного бака
- уровень топлива
- максимальное значение тахометра
- можно еще и стоимость топлива
Последний пункт “Коррекция экономичности” выставляется в процессе диагностики. Все эти данные будут учитываться приложением для некоторых подсчетов.
В конце имеется кнопка “SHOW ADVANCED SETTINGS” – расширенные настройки.
Здесь рекомендуется установить следующие значения.
- Подключаться через указанный Blutooth (выбрать из списка)
- предпочтительный протокол OBD (выбрать из списка)
Кнопкой “Сохранить” завершите настройку профиля.
Приложение для проверки штрафов ГИБДД
Видеорегистратор из смартфона на Андроид
Навигатор на смартфоне
Настройка приложения Torque Pro
Теперь переходим к настройкам приложения. В левом углу экрана имеется шестерня, тап по ней откроет “Меню”, где и перейдем к настройкам. Здесь рассмотрим только необходимые пункты настроек.
Основные настройки
Здесь нужно отметить галочками только четыре пункта:
- Показать панель уведомлений
- автоповорот
- ошибка Blutooth
- включить отладчик
Темы
Эту настройку оставляю на ваше усмотрение. Она отвечает за оформление панели приборов, фонового изображения.
Плагины
Приложение работает за счет установленных плагинов список которых можно пополнить нажав соответствующую ссылку с названием в самом низу.
Произойдет переход на страницу с дополнительными плагинами. На мой взгляд, они могут подойти только продвинутому и фанатеющему от диагностики пользователю.
Основного пакета вполне хватит для получения детальной информации. Эти же и другие плагины можно скачать в Плэй Маркет.
Единицы измерения
Здесь нельзя навязывать свою позицию. У каждого свои единицы измерения. Думаю, вы сделаете правильный выбор. Мой выбор пал:
- градусы
- килограммы
- psi
- ньютонометры
Настройки адаптера OBD
В этом пункте отметьте только первые три настройки
- авто Вкл/Выкл Blutooth (при запуске программы произойдет автоматическое включение Blutooth и выключение после закрытия программы.
- если ВТ был выключен ( как бы дублирует предыдущую)
- быстрое подключение (здесь понятно без комментариев)
Запись и выгрузка журналов
Эту настройку можно проигнорировать, а можно и покопаться в ней, если вы планируете собирать данные считанные с датчиков. Возможно ведение журнала кому-то пригодится.
Панель приборов
В этом разделе я ничего не отмечал, но если держать программу в активном состоянии, поставьте первые две галочки. Рекомендовано для Андроид устройств.
Рекомендовано для Андроид устройств.
- Запустить Torque после перезагрузки
- Delayed obd connection
Речь/Предупреждения
В свою очередь, интересная настройка. Предупреждение голосом о некоторых важных моментах в работе двигателя (если эти функции поддерживаются компьютером).
- низкая температура
- уровень топлива
- достижение двигателем рабочей температуры
Здесь также на усмотрение пользователя.
Управление предупреждениями
Этот пункт является дополнением предыдущего и осуществляет вывод на панель настроенные предупреждения
Пиды (PID) для Torque Pro
Важный момент. Для каждого автомобиля имеется файл с набором дополнительных датчиков. В программе по умолчанию находится всего несколько моделей. Вам нужно найти и загрузить файл под ваш автомобиль.
Ссылки где поискать даю:
Torque Pro руссифицированный для Андроид на Google Play Тут на 4PDA —Тут (халява)
PIDы (файлы) – Здесь
Смотрите, есть ли нужный вам PID в списке и забирайте одним файлом.
Забрать
Установка файла
- Находите файл программы “torque”.
- Далее, нужно найти скрытый файл “extendedpids”. В диспетчере файлов включите функцию “Показать скрытые файлы”.
- Закидываете файл “csv” в эту папку.
- В управлении доп. датчиками жмете “Добавить набор”
- В открывшемся окне увидите загруженный вами файл и выбираете.
Все готово. Произошла загрузка дополнительных PID датчиков в приложение.
На этом этапе с настройками можно закончить. Оставшиеся не важны и поэтому не будем тратить на них время.
Приборная панель
Теперь остается настроить панель и вывести на неё необходимые датчики. По умолчанию в программе уже выставлено несколько приборов учета, но можно добавить те, которые вы считаете нужными.
С главной страницы приложения переходите в “Приборная панель”. Жмете на пустой экран и ждете появления оповещения “Настройка элемента” и далее “Добавить прибор”.
Следующим шагом выбираете наиболее симпатичную вам шкалу и тапните на неё.
Теперь нужно выбрать интересующий вас датчик. Выбирать нужно только зеленые датчики, остальные показаний не дадут. В зависимости от автомобиля количество активных датчиков разное.
Список большой, есть где покопаться.
Каждый выведенный элемент на приборную панель можно настраивать (нажать и подождать):
- изменить размер
- сбросить данные
- переместить
- сделать плавающим
- удалить
На этом подготовку приложения к работе заканчиваем. Запускаете двигатель и наслаждайтесь полученными результатами.
Остались не охвачены несколько функций приложения и вкратце мы их рассмотрим.
Проверка на ошибки
Для проверки наличия ошибок переходите с главной в “Считывание ошибок”, запускаете поиск. Через некоторое время приложение покажет результат.
Как сбросить ошибку смотрите в видео. Главное помните, сбросив ошибку и не устранив неисправность она появиться вновь. Появление ошибки это сигнал к действию.
Главное помните, сбросив ошибку и не устранив неисправность она появиться вновь. Появление ошибки это сигнал к действию.
Но бывает и наоборот, неисправность устранена а ошибка не сбрасывается. Вот тут поможет Elm327 и Torque Pro.
Обзор на карте
После запуска приложения будет запрос на включение GPS. Активировав его, программа будет записывать все ваши поездки и показывать их на карте. В последствии вы можете поделиться ими, просмотреть и удалить.
Результаты испытаний
Вот здесь, каюсь, я толком ничего не понял. Понятно только то, что отмеченные зеленым цветом датчики это значит нормально.
Графики
Обычно цифровая информация лучше воспринимается при помощи графиков. Такая возможность предоставлена этим плагином.
Для начала необходимо настроить график выбрав:
- вид
- число записей
- интервал опроса
Кнопкой “Selekt X axis sensors” добавить нужные датчики и сохранить.
Вот такая получилась инструкция torque pro на русском языке. Я старался дать информацию по максимуму. Если возникнут трудности или что-то непонятно, пишите в комментариях. Будем смотреть и разбираться.
Программы диагностики, инструкции K-line 409, ELM327, Автоком Delphi часть1
Torque Pro
Работает на планшетных устройств, как Motorola Xoom, Dell Streak, и Samsung Galaxy Tab Работает на любой автомобиль, который поддерживает OBD 2 стандартных (в большинстве транспортных средств, построенных после 2000 года, но может работать для автомобилей еще в 1996) — если есть сомнения проверить у производителя вашего первого или искать «OBD2» на написанное на большие белые метки в моторном отсеке Работы на транспортных средствах, сделанные Ford, GM / Vauxhall / Opel, Chrysler, Mercedes, Volkswagen, Audi, Jaguar, Citroen, Peugoet, Skoda, Kia, Mazda, Lexus, Daewoo, Renault, Mitsubishi, Nissan, Honda, Hyundai, BMW, Toyota, Seat, Dodge, Jeep, Pontiac и многое другое транспортное средство делает, Европы, США, Дальнего Востока, и т. д. Некоторые ЭБУ автомобиля может поддерживать больше или меньше возможностей, чем другие. Приложение потребности Bluetooth адаптера OBD2 на работу.
д. Некоторые ЭБУ автомобиля может поддерживать больше или меньше возможностей, чем другие. Приложение потребности Bluetooth адаптера OBD2 на работу.
AlfaOBD
Программа работает через адаптеры OBDKey, K-Line, ELM327. Для связи с некоторыми блоками требуется переделать адаптер или использовать переходник Fiat 3pin.
Основные функции:
- читать данные с электронных блоков
- мониторить данные двигателя, коробки передач, ABS, климата, панели приборов
- читать статические данные: идентификация модулей, состояние системы, коды ошибок с обьяснением возможных причин неполадок
- очистка памяти ошибок
- активная диагностика и конфигурационные процедуры для оборудования (Airbag, ECU, климат, панель приборов)
- программирование электронных ключей и радио брелков замка.
TECU 2.3.2.1
Программа поддерживает протокол Toyota/Lexus, протокол Nissan Consult II, протокол Nissan Consult I, часть протокола Hyundai, часть протокола ECU Delphi MT20U автомобиля Cherry Tiggo, часть протокола MUT-II автомобилей Mitsubishi, часть протокола DAIHATSU и стандартные протоколы OBD-II: ISO-14230 (5 baud init/Fast init), ISO-9141, по которым можно тестировать Honda, Hyundai и др. авто.
авто.
Scanmaster ELM
Программа предназначена для диагностики автомобилей по стандартам OBD-II/EOBD, которые были разработаны специально для ELM327 чип, от компании ELM Electronics и поддерживает все OBD-2 диагностические протоколы связи, такие как SAE J1850 (PWM & VPW), ISO15765, CAN, ISO9141 и ISO14230. Работает с адаптерами ELM327 через различные интерфейсы: ELM327 Bluetooth, ELM327 USB и ELM327 WiFi.
PCMscan
Работает с адаптерами на чипах ELM 32X. Позволяет просматривать данные онлайн, freeze frame, ошибки двигателя и некоторых АКПП (читать и стирать), проводить исполнительные тесты и мониторинг систем, имеет встроенный Dynometer. Умеет отображать данные в в графическом виде в виде приборов и графиков. Работает с авто с 1996г. американского рынка, с 2001г. с европейскими бензиновыми, с 2004г. с европейскими дизелями.
ScanXL Professional
ScanXL Professional — программа для диагностики авто по протоколу OBDII (OBD2) для адаптера ELM327.
TiggoDiag
Программа для диагностики Tiggo Diag — это лучшее решение для автолюбителей имеющих в своем пользовании автомобили китайского производителя Chery, Great Wall и другие.
Представленная программа для диагностики автомобилей Chery и Great Wall Tiggo Diag позволит Вам при наличии обычного K-Line адаптера или ELM327 адаптера производить не только диагностику двигателя, но и работать с дополнительными устройствами автомобиля.
HobDrive
Первичная задача HobDrive — непрерывно работать в вашей машине, собирать статистику и анализировать производительность используя OBD-II адаптер.
HobDrive совместим с большинством современных автомобилей:
- Российские автомобили с контроллерами Январь и Bosch (ВАЗ, Волга-Сайбер, УАЗ Патриот)
- Большинство иномарок с 1995 года выпуска (OBD2 совместимые)
- Редкие модели, обычно не диагностируемые обычными программами: JDM (японский внутренний рынок) — Nissan и Toyota, Chery Tiggo, и другие.
OpenDiag Mobile
Программное обеспечение под android 3.1 и выше для диагностики автомобилей российского производства, с применением ELM 327 Bluetooth или Wi-Fi адаптера, USB-COM с чипом FTDI.
- ВАЗ:
- BOSCH M1.5.4 R83
- BOSCH M1.5.4 E2
- BOSCH MP7.0 E3
- BOSCH MP7.0 E2
- BOSCH M7.9.7 E3/E4
- BOSCH M7.9.7 E2
- BOSCH ME17.9.7
- BOSCH ME17.9.7CAN
- Январь-5 R83
- Январь-5 E2
- Январь 7.2 E2
- Ителма VS5.1 E2
- Ителма VS5.1 R83
- Ителма/Автэл M73 E3
- Ителма M74
- Ителма M74K (Классика)
- Ителма M74CAN
- Ителма M74CAN MAP
- Ителма M75
- Ителма M75CAN
- Ителма M86CAN
- ГАЗ/УАЗ:
- BOSCH ME17.9.7 MT
- BOSCH ME17. 9.7 ET
- BOSCH ME17.9.7(1) MAP
- СОАТЭ (ГАЗ) ***
- Микас 5.4 (ГАЗ) ***
- Микас 5.4 К3 (карб) (ГАЗ) ***
- Микас 7.1, VS 5.6 ***
- Микас 7.1 К3 (карб) ***
- Микас 7.2 (УАЗ) ***
- Микас VS8 E2
- Микас 10.3/11.3 *
- Микас 11 E2
- Микас 11 Е3 МТ и ЕТ (мех. и электр. дроссель) **
- Микас 11 CR
- Микас 12
- Микас 12.3
- ЗАЗ:
- Микас 10.3/11.3+ *
- Микас 10.3/11.3
- Микас 7.6
 9.7 ET
9.7 ET* Дополнительные параметры (Пропуски воспламенения) только через USB K-Line.
** Блоки требуют защищенного режима! Вход в него может потребовать отправку блоку длинного запроса! Elm327 не поддерживает такие запросы! В таком случае, подключение к этим блокам возможно только через USB K-Line
*** Подключение к блокам только через USB K-Line.
OpenDiag для Windows
Программа предназначена для компьютерной диагностики автомобильных систем инжекторных автомобилей российского производства. Программа используется для проведения технического обслуживания и ремонта автомобилей в автосервисах, СТО или владельцем автомобиля при наличии соответствующего оборудования (адаптеров и ПК).
Программа используется для проведения технического обслуживания и ремонта автомобилей в автосервисах, СТО или владельцем автомобиля при наличии соответствующего оборудования (адаптеров и ПК).
Программа может работать с тремя видами адаптеров: K-line адаптер, ELM327, а также J2534 (MiniVCI, OpenPort 2.0 и подобные) (в бесплатной версии данный адаптер не поддерживается).
Diagnostic Tool
Программа позволяет диагностировать и отображать все параметры блока управления двигателем по протоколу K-line.
Поддерживает блоки управления:
- Bosch M1.5.4(N) (все модификации)
- Bosch MP7 (Euro-II / Euro-III)
- Bosch M7.9.7 (Euro-II)
- Январь 5.* (все модификации)
- Январь VS 5.* (все модификации)
- Январь 7.* (все модификации)
- Микас 5.4
- Микас 7.1.
EconTool ELM327 for Nissan
Программа для диагностики автомобилей Nissan по протоколу Nissan Consult.
Программу можно также скачать с Google Play маркета.
Motordata ELM327 (RUS)
Бесплатная программа для диагностики дял ELM327 на русском языке от компании «Легион-Автодата»
Позволяет с помощью ноутбука и адаптера ELM327 USB и ELM327 Bluetooth настроить работу двигателя и сделать расширенную диагностику. Отличительной особенностью программы является дополнительная возможность Motordata ELM327 диагностировать праворульные автомобили Toyota.
ELMConfig
Крутая программа по возможностям для диагностики, настройки и даже чип-тюнинга автомобилей марки Форд. При чем эта программа бесплатная на русском языке!
OBDwiz
OBDwiz — это программа для компьютерной диагностики автомобилей. Работает с такими устройствами, как ELM327, Scantool OBD Link и другими.
По функциям на уровне ScanmasterELM и даже является бесплатной. Поэтому часто используется в работе, потому что ее не нужно взламывать для работы.
OliviaDrive
Это бесплатная программа диагностики, основное преимущество которой является точные измерения расхода топлива. Показания такие же, как и бортового компьютера.
Carista
Программа диагностики автомобилей для bluetooth устройств. Аналог Torque Pro, но в ней имеется отличие в том, что она может настраивать работу электроники. Т.е. делать активации/деацтивации дополнительных функций.
Например, на Skoda Octavia A5 можно настроить тест стрелок и аналогичные функции.
JeepDiag
Программа диагностики под конкретную марку и модель авто — Jeep Grand Cherokee 2.7 CRD. Представлена в трех версиях: Free версии для Windows, Android; PRO версия для Android.
ELMScan Toyota
Программа поддерживает следующие блоки авто:
— Двигатель
— Трансмиссия
— Круиз-контроль
— Иммобилайзер
— ABS/VSC/TRC
— Подвеска
— Электроусилитель рулевого управления
— VGRS
— Датчик дождя
— SRS Airbag.
DDT4ALL
Крутой софт для владельцев авто марки Renault. Потому что с помощью него можно сделать как полную диагностику всех систем, там и настройку электроники. Есть русский язык (частично).
Для примера, можно настроить контроль давления в шинах через систему ABS и многое другое!
Pid для torque mercedes
Эта статья для тех кто ищет программы диагностики для сканера ELM327 или VAG COM 409. Длительное время собираю для своих клиентов и тех кому нужно софт. В этот раз обновление получилось большое.
Torque Pro 1.8.199
Плагины для Torque
PID файлы для Torque
HfmScan Mercedes
ELM терминалы
OpenDiag Mobile 2.15.6
JeepDiag Free Android
OBDeleven (альтернатива VCDS на андроиде)
CASCADE 0.9.4
ELMScan Toyota
FFConfigLite
Nissan DataScan I 1.54
ddt4all for XP с полной базой Рено 2017
Полный список PID файлов для программы Торк выглядит так (на текущий момент 06. 03.18):
03.18):
BYD F3 для ЭБУ Delphi MT20U
Citroen C4 2014
Citroen C5 5FN 2011
Chery Tiggo
Chevrolet Daewoo Sirius D42
Daihatsu Sirion — Toyota Passo
Daihatsu Terios
Ford Focus 2004 1.8TDCi
Ford Focus II
Geely M7.9.7
Geely MT20U2
Geely ABS MK70
GreatWall с ЭБУ Delphi MT20U2 + Lifan 620
Honda Accord 2.4 2009
Honda FIT GK3 2014
Hyundai Elantra 2003 2.0
KIA Venga 2010 дизель
Lifan Solano ABS
Land Rover Freelander II 2.2 SD4
Land Rover Discovery III дизель 2.7
Land Rover Discovery IV дизель 3.0
Mercedes Benz W203 CDi 2005
Mitsubishi Cedia GDI
Mitsubishi Pajero 4 V93W 2010
Mitsubishi Outlander 2008-2013
Mitsubishi L200, new Pajero Sport
Nissan Murano z51WOH
Opel Combo-C 1.3 CDTi
Opel Astra-K 1.6 2016
Opel Multec S
Opel Vectra B X18XE
Opel Vectra Simtec 56.5
Range Rover 3.6
Renault Duster 2.0 2014
Renault Duster 1.6 рестайл
Renault Duster 1.5 dCi 2016
Renault Logan ЭБУ EMS3132
Renault Logan II, Sandero II
Renault Kangoo 1. 5 DCI 2008
5 DCI 2008
Renault Megane, Fluens
Renault Megane II 2007 1.6 К4М
Renault Sandero 2014
Renault Scenic RX4 2002
Renault Trafic 2
Skoda Octavia
SsangYong бензин 2.3 MSE
SsangYong Kyron D20DT
Suzuki Swift 2005
Toyota Axio 2006
Toyota Prius 2
Toyota Prius 3
Toyota Corolla 2002 дизель 2.0 1CD-FTV
Toyota Cami K3-VE, Terios K3-VE, Duet EJ-DE, Terios EF-DEM
Toyota Sienta ABS 1NZ-FE-CVT
Toyota Vitz 1KRFE 2009
VAG для ЭБУ EFI KW2089
Volvo XC70 D5 2008
ВАЗ Ителма/Автел для ЭБУ M7.3
ВАЗ для ЭБУ Январь 5.1
ВАЗ для ЭБУ Январь 5.1.1
ВАЗ для ЭБУ Январь 7.2
ВАЗ для ЭБУ Bosch MP7.0
ВАЗ Largus ABS
ВАЗ Largus SRS
ЗАЗ Микас 7.6
ЗАЗ Микас 10.3
УАЗ Патриот для ЭБУ M 17.9.7
УАЗ турбо дизель ЗМЗ 51432
Что нового в Торк (из официального сайта) — Torque Pro
v1.8.199
* Fixed issue saving fault code lists
* Added Android device battery level pid
* Added link to PID editor from dashboard screen in display configuration when the display is linked to a user created PID
* J1939 support for large vehicles (Busses, Boats, Plant equipment, etc) – Select the protocol from the vehicle profile settings to use it
* Update to fix some non-obd compliant nissan ECUs as well as others ECUs that may cause to report ’No PIDs available’
* Totaliser (and averaging, etc) equations now have the ability to save their ’learned’ data as part of the PID definition
* Fix difficult to reproduce hang in profile activity when exiting and the handset has a problematic bluetooth driver
* bitwise operator notation deprecated and replaced with BIT(A:1) function
* PID editor now keeps the screen on when editing (and more importantly, when using the the ‘test’ button)
* Added LOOKUP() and CLOSEST() functions (documentation to appear in wiki shortly)
* Fixed a crash in the graphing activity when used with android versions less than 3
* Added INT24(A:B:C) function (in next beta update)
* Update tile server with fresh maps (map widget)
* Scale map widget graphic up on high dpi handsets
* Fix temperature notification message not resetting
* Fix ANR when power-disconnected received (in-dashboard settings)
* Change to point at new theme server
* Add support for generic BLE serial connections
* Add new extended information activity to adapter information screen
* Fix a centering problem with text on a few screens
* Added MAX(x:y) and MIN(x:y) functions. Max returns the greater of x or y, and min returns the smaller of x or y
Max returns the greater of x or y, and min returns the smaller of x or y
* Fix titles in O2 graph display showing wrong title (stuck on sensor one) when in fact it was showing a different sensor
* Update the ‘choose bluetooth device’ dialog to be more intuitive and easier to see when you have a lot of bluetooth devices paired (or BLE devices in range)
* Equation editor no longer shows the error popup over the currently editing area if the equation is multi-line
* ‘Add Display’ menu now uses more decimal places for some PIDs(sensors) when previewing to avoid rounding
* Updated status icons in starting screen
* Add drag coefficient to vehicle profile settings (advanced)
* Add vehicle ‘type’ to vehicle profile settings
* Add different icons for trucks, minivans, bikes, boats, plant, etc
* Update adapter benchmark activity with new options and graphs
* Fix a timeout issue with the new BLE code
* UI updates to the vehicle profile
PID (параметр идентификации данных, ПИД) — код, посылаемый блоку управления ECU, однозначно определяемый параметр, который должен тот вернуть. Для разных автомобилей могут отличаться даже по годам.
Для разных автомобилей могут отличаться даже по годам.
Теперь надо разобраться как редактировать, просматривать и добавлять дополнительные PIDы в программу Torque.
Как добавлять PIDы в Torque
- Нужно найти и скачать на смартфон набор ПИДов в формате «csv», подходящий для вашего автомобиля. Некоторые из них можно найти в данной статье ниже по тексту.
- Скачанный набор PIDов помещаем в папку «.torque/extendedpids». Папка «.torque» находится в корне карты памяти или памяти телефона. Обращаем внимание, что эта папка является скрытой и чтобы получить к ней доступ необходимо включить отображение скрытых папок. На скриншотах все действия с файлами производятся файловом менеджере «ES проводник», у вас может быть установлен другой.
- Написать «csv» файл проще, чем прописывать дополнительные ПИДы в ручную в программе. Можно воспользоваться блокнотом или любым текстовым редактором, Microsoft Excel вносит ошибки при сохранении файла, лучше пользоваться редактором notepad++
В файле «csv» первой строчкой идет шапка, вторая и последующие строки — это создаваемые ПИДы, структура записи которых аналогична шапке.

Синтаксис формул PID
Ответ ЭБУ обычно состоит из нескольких байт. Для обращения к определенному байту ответа используется буквенная адресация.
A-1 байт ответа, B-2, C-3, …, Z-26, AA-27,AB-28.
Для составления формулы используются следующие операции:
A*10 — умножение
A/2.5 — деление
A+B — сложение
B-10 — вычитание
A
PID (параметры идентификации данных, ПИД) является кодом, посылаемым на блок управления ECU. Для разных авто набор запросов отличается. Во время настройки можно добавлять дополнительный PID и редактировать его. Это можно сделать с помощью приложения Torque.
Алгоритм добавления PIDов в Torque
- Скачиваем на устройство набор ПИДов. Файл должен быть в формате *.csv (см. Таблица Расширенные параметры).
Прописать *.csv файл в дополнительные ПИДы в ручную намного сложнее, чем написать самому. Для этого нужен всего лишь текстовый редактор (notepad++ и другие). При попытке редактирования и создания в табличном процессоре могут возникать ошибки.
При попытке редактирования и создания в табличном процессоре могут возникать ошибки.
В файле *.csv в первой строчке прописана шапка. Во второй и последующей сами ПИДы. Их структура аналогична шапке.
Управление двигателем, OBD-II, Диагностика двигателя и др. »
Привет народ!У меня Daihatsu Copen (код двигателя L800K). В машине много ЭБУ, особенно меня интересует ЭБУ крыши. Этот ЭБУ управляет механизмом крыши, электрическими стеклоподъемниками и т. Д. Я хочу иметь возможность управлять окнами с помощью дешевой подделки ELM327. Автомобиль использует быструю инициализацию ISO 14230 (на sp5), ISO 14230 медленную инициализацию (на sp 4), а также, похоже, поддерживает ISO 9141-2 (на sp 3).
Мне удалось успешно прослушать данные, поступающие от инструмента уровня дилера, называемого DS-II (то же устройство, что и Toyota Intelligent Tester), с помощью Y-разветвителя.
Данные были зарегистрированы с использованием следующих команд на ELM — ath2, ats1, atal, atsp5 и, наконец, atma. DS-II было приказано войти в ЭБУ крыши и опустить окна. Ниже представлена соответствующая часть обмена данными.
DS-II было приказано войти в ЭБУ крыши и опустить окна. Ниже представлена соответствующая часть обмена данными.
Цитата:
81 BC F0 81 AE
83 F0 BC C1 E9 8F 68
83 БК F0 30 03 01 63
83 F0 BC 70 03 01 A3
81 BC F0 82 AF
81 F0 BC C2 EF
Насколько я могу судить,
81 BC F0 81 AE — это строка инициализации, отправляемая из DS-II (F0) в ЭБУ крыши (BC).
83 F0 BC C1 E9 8F 68 — это ответ от ЭБУ крыши (говорит, что продолжить / данные в порядке ??).
83 BC F0 30 03 01 63 — это DS-II, говорящая «пожалуйста, опустите окна».
83 F0 BC 70 03 01 A3 — это крыша с надписью «опущены окна».
81 BC F0 82 AF — это DS-II, говорящее «готово сейчас».
81 F0 BC C2 EF — это ЭБУ крыши, говорящий «хорошо, пока».
Когда я пытаюсь отправить команды через свой ELM327, мои команды возвращают NO DATA .Пока пробовал отправить
81 BC F0 81 AE — НЕТ ДАННЫХ
83 BC F0 30 03 01 63 — НЕТ ДАННЫХ
81 BC F0 82 AF — NO DATA
Я попытался установить заголовок, используя AT SH 81 BC F0 , AT SH 83 BC F0 и AT SH 80 BC F0 , затем отправив остальную часть строка, безрезультатно.
Как мне отправлять эти команды через ELM327?
Дополнительная программа Automechanika Shanghai 2015 включает рекордные предложения
В этом году на 11 -й Automechanika Shanghai, крупнейшей в Азии выставке автомобильных запчастей, аксессуаров, оборудования и услуг, представлены 50 профессиональных, эффективных, отраслевых В рамках дополнительной программы одновременно будут проводиться различные мероприятия.
Неофициальная программа, объединяющая профессиональные и экспертные мероприятия, значительно расширилась по сравнению с прошлым годом за счет новых, более крупных площадок и выставочных площадей для выставки 2-5 декабря. Новое место, Национальный выставочный и конференц-центр, Пуси, Шанхай, больше, оптимизировано 280 000 кв. М площадей для подбора поставщиков, что на 27 процентов больше, чем в прошлом году.
Automechanika Shanghai известен своей специальной программой, предлагающей что-то для всех. Каждая тема охватывает различные секторы всей отраслевой цепочки и имеет особый формат для удовлетворения различных потребностей многочисленных участников отрасли.
Дополнительная программа — это инструмент для создания бренда, создания сетей, образования и обучения, используемый через Automechanika Shanghai. В секторе аксессуаров и тюнинга в этом году запланирована программа. В этом году в этом секторе наблюдался самый сильный рост среди всех других секторов, включая запасные части и компоненты, ремонт и техническое обслуживание, а также новейший сектор электроники и систем.
Accessories & Tuning планирует несколько интерактивных мероприятий, в том числе посвященных экологически безопасным методам и продуктам.На месте будут проводиться живые демонстрации применения консервационных средств для мойки автомобилей, которые также будут включать управляемую видеотрансляцию с интерактивными мероприятиями. Помимо обучения тому, как делать «более экологичный» выбор, в этом секторе также будут представлены презентации модифицированных автомобилей в китайском стиле, принципы модификации Megane RS, демонстрация окраски капота двигателя, технологии дрифта и демонстрация модифицированных автомобилей.
Ведущие бренды признают преимущества организации мероприятий на выставке Automechanika Shanghai.В этом году отраслевые бренды, проводящие мероприятия, включают Bosch, CTP, ITW, Federal-Mogul и Liqui-Moly. Темы дополнительных программ включают широкий спектр семинаров по созданию бренда, представлению новых продуктов и продвижению технологий. Кроме того, есть много возможностей для пресс-конференций и обучения.
Automechanika Shanghai — платформа для растущего числа правительственных агентств и организаций, которые выбрали Automechanika Shanghai для продвижения своих инвестиционных возможностей в своем регионе.В этом году к периферийной программе присоединились Китайская ассоциация автопроизводителей, Frankfurt Rhine-Main GmbH — Международный маркетинг региона, Китайский совет по развитию международной торговли, Совет Сычуани (CCPIT-Sichuan) и Международная торговая палата Шанхая.
В других секторах также отмечен значительный рост. Несколько мероприятий в рамках дополнительной программы были организованы совместно с дополнительными новыми отраслевыми ассоциациями и организациями, которые делятся последней информацией и разработками в отрасли и технологиях. Влияние и возможности установления контактов с Automechanika Shanghai предоставляют отраслевым экспертам отличный форум для обмена и продвижения новейших продуктов и концепций. Это расширение направлено на удовлетворение растущих потребностей увеличивающегося парка автомобилей.
Влияние и возможности установления контактов с Automechanika Shanghai предоставляют отраслевым экспертам отличный форум для обмена и продвижения новейших продуктов и концепций. Это расширение направлено на удовлетворение растущих потребностей увеличивающегося парка автомобилей.
Некоторые основные моменты дополнительной программы Automechanika Shanghai 2015 включают:
• · Форум высшего руководства и поставщиков AIAG по закупкам автозапчастей 2015
• · 4-й Международный саммит дилеров AUTOHAUS CHINA 2015
• · Саммит автозапчастей 2015
• · Саммит по тенденциям закупок OEM-производителей автомобилей 2015
• · Саммит по ремонту и техническому обслуживанию автомобилей в Китае 2015
• · Саммит индустрии столкновений в Китае
• · ENJOY CAR PARTY Салон культуры тюнинга автомобилей в Шанхае 2015
• · Международный автомобильный конгресс 2015
• · Инвестиционные возможности для китайских автомобильных предприятий во Франкфурте Рейн-Майн
• · Автомобили и электромобили, подключенные к SAE, 2015
• · Саммит: стратегии слияний и поглощений китайских автомобильных корпораций на зарубежных рынках.
Многие мероприятия дополнительной программы открыты для представителей отрасли. Для получения дополнительной информации посетите сайт www.automechanika-shanghai.com/fringeprogramme и предварительно зарегистрируйтесь онлайн, чтобы зарезервировать места.
Подпишитесь на Aftermarket Business World и получайте подобные статьи каждый месяц … Абсолютно бесплатно. Щелкните здесь .
Обзор телецептивного зондирования для носимых вспомогательных робототехнических устройств
Современные протезы и экзоскелеты нижних конечностей используют иерархическую структуру, в которой контроллер высокого уровня оценивает общий желаемый режим передвижения при каждом идентифицированном событии походки (контакт пятки или выключение носка), контроллер среднего уровня оценивает желаемое поведение конечности во время определенного режима передвижения и фазы походки на основе биомеханических моделей здоровой ходьбы, а контроллер низкого уровня модулирует команды двигателя для достижения желаемое поведение [81]. В рамках этой иерархической структуры существует несколько потенциальных возможностей для повышения производительности за счет включения телецептивного зондирования. Предварительное тестирование нескольких приложений в контроллерах высокого и среднего уровня в процессах сегментации походки, обнаружения местности / распознавания намерений и управления для конкретных режимов подробно описано ниже. представляет собой резюме публикаций, в которых обсуждается телецепция для вспомогательных устройств нижних конечностей.
В рамках этой иерархической структуры существует несколько потенциальных возможностей для повышения производительности за счет включения телецептивного зондирования. Предварительное тестирование нескольких приложений в контроллерах высокого и среднего уровня в процессах сегментации походки, обнаружения местности / распознавания намерений и управления для конкретных режимов подробно описано ниже. представляет собой резюме публикаций, в которых обсуждается телецепция для вспомогательных устройств нижних конечностей.
4.3.1. Обнаружение события походки
Прямое прогнозирование желаемого режима передвижения для протеза или ортеза с электроприводом происходит для каждого шага при идентифицированных событиях походки, таких как контакт пятки, отрыв носка, середина или средний замах.События походки, подобные этим, также могут предоставить контекст для биомеханики индивидуальной ходьбы, такой как симметрия, время двойной поддержки и многое другое. Эти события походки обычно обнаруживаются с помощью датчиков нагрузки, контакта или движения носимого устройства [82]. Это прямой и надежный подход; однако не все носимые устройства имеют эти датчики. Кроме того, у пользователей протезами обычно нет дополнительных датчиков, размещенных на противоположной конечности, поэтому координация между конечностями невозможна.Для анализа походки можно эффективно использовать несколько методов, не пригодных для ношения, в том числе использование сенсорных ковриков [83], захвата движения [84] или камеры [85], но, поскольку они непереносимы, их можно использовать для повседневного управления носимым устройством. неосуществимо. Недавно для этой цели было предложено использование переносного телецептивного датчика.
Это прямой и надежный подход; однако не все носимые устройства имеют эти датчики. Кроме того, у пользователей протезами обычно нет дополнительных датчиков, размещенных на противоположной конечности, поэтому координация между конечностями невозможна.Для анализа походки можно эффективно использовать несколько методов, не пригодных для ношения, в том числе использование сенсорных ковриков [83], захвата движения [84] или камеры [85], но, поскольку они непереносимы, их можно использовать для повседневного управления носимым устройством. неосуществимо. Недавно для этой цели было предложено использование переносного телецептивного датчика.
Алгоритм для прогнозирования событий походки, основанный на односторонних, совместно размещенных на бедрах датчиках глубины ToF и IMU, был представлен в [86]. Эта работа должна была быть независимой от устройств, предполагалось, что имитируемый «протез» будет носить на правой стороне, и поэтому двойная поддержка была предсказана только с использованием датчиков, установленных на правом бедре. SVM был обучен предсказывать события походки на основе IMU бедра. Контралатеральная нога была видна в поле зрения датчика глубины, как и окружающая среда, а особенности движения этих объектов в космосе использовались для обучения предсказателя на основе нового подхода к сопоставлению шаблонов. Прогнозы для каждой модальности датчика затем были линейно объединены, и результаты испытаний ходьбы с одним здоровым субъектом показали, что объединение данных от одного датчика глубины и IMU позволило приблизиться к наземной истине со смещением событий походки в 6 раз. мс и результат F1 92.5%. Авторы предполагают, что преимущества добавления измерения глубины будут больше во время ходьбы для субъектов с аномалиями или асимметрией походки или для координации между двумя устройствами.
SVM был обучен предсказывать события походки на основе IMU бедра. Контралатеральная нога была видна в поле зрения датчика глубины, как и окружающая среда, а особенности движения этих объектов в космосе использовались для обучения предсказателя на основе нового подхода к сопоставлению шаблонов. Прогнозы для каждой модальности датчика затем были линейно объединены, и результаты испытаний ходьбы с одним здоровым субъектом показали, что объединение данных от одного датчика глубины и IMU позволило приблизиться к наземной истине со смещением событий походки в 6 раз. мс и результат F1 92.5%. Авторы предполагают, что преимущества добавления измерения глубины будут больше во время ходьбы для субъектов с аномалиями или асимметрией походки или для координации между двумя устройствами.
4.3.2. Прогнозирование вперед
После того, как событие походки идентифицировано, необходимо классифицировать двигательную активность следующего шага. Хотя теоретически можно использовать брелок для ключей или нерегулярное движение, чтобы сигнализировать о желаемой активности, выполнение этого на каждом шаге было бы довольно утомительным и медленным. Для некоторых ступеней, например, при спуске по лестнице, это также может быть опасно [60], особенно для людей, которые уже несколько нестабильны. Таким образом, необходимо предварительное прогнозирование желаемой двигательной активности. Затем для управления траекторией, жесткостью или другими параметрами робототехнического устройства можно использовать контроллер среднего уровня, зависящий от фазы походки и основанный на активности. В предыдущей работе было предложено использовать прямые предикторы на основе машинного обучения на основе ЭМГ, кинетики и кинематики для оценки желаемой двигательной активности.Совсем недавно несколько исследовательских групп изучали возможность использования телецептивного зондирования местности для улучшения прогнозирования желаемой двигательной активности.
Для некоторых ступеней, например, при спуске по лестнице, это также может быть опасно [60], особенно для людей, которые уже несколько нестабильны. Таким образом, необходимо предварительное прогнозирование желаемой двигательной активности. Затем для управления траекторией, жесткостью или другими параметрами робототехнического устройства можно использовать контроллер среднего уровня, зависящий от фазы походки и основанный на активности. В предыдущей работе было предложено использовать прямые предикторы на основе машинного обучения на основе ЭМГ, кинетики и кинематики для оценки желаемой двигательной активности.Совсем недавно несколько исследовательских групп изучали возможность использования телецептивного зондирования местности для улучшения прогнозирования желаемой двигательной активности.
а. Методы геометрической сегментации
В одной из самых ранних попыток использования телецептивного зондирования для улучшения характеристик протеза или экзоскелета нижних конечностей с электроприводом, Zhang et al.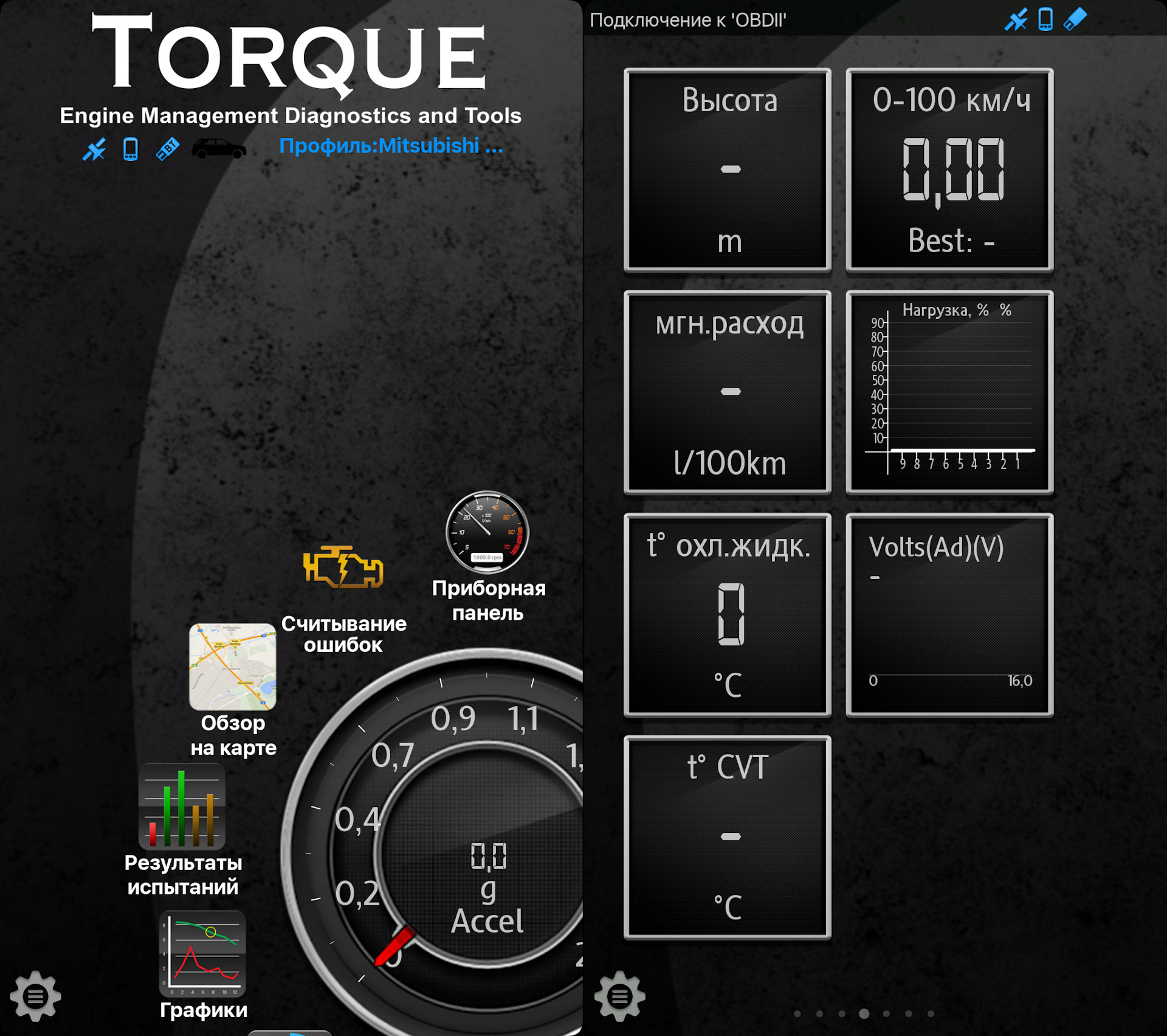 [87] предложили использовать лазерный датчик расстояния, который обеспечил бы единичное измерение расстояния, которое можно было бы использовать для прогнозирования высоты местности на основе известной высоты датчика, интегрированного сигнала IMU и знания типичной геометрии местности.IMU использовался, чтобы различать неподвижность и движение или поворот, а распознавание местности производилось с использованием определяемого лазером расстояния и алгоритма на основе правил. Эта система была оценена с использованием временного порога, в соответствии с которым переход местности необходимо было правильно идентифицировать в течение критического периода времени, иначе это будет считаться ошибочным. Эта система достигла средней общей точности 98% при времени прогнозирования местности 2,3 с.
[87] предложили использовать лазерный датчик расстояния, который обеспечил бы единичное измерение расстояния, которое можно было бы использовать для прогнозирования высоты местности на основе известной высоты датчика, интегрированного сигнала IMU и знания типичной геометрии местности.IMU использовался, чтобы различать неподвижность и движение или поворот, а распознавание местности производилось с использованием определяемого лазером расстояния и алгоритма на основе правил. Эта система была оценена с использованием временного порога, в соответствии с которым переход местности необходимо было правильно идентифицировать в течение критического периода времени, иначе это будет считаться ошибочным. Эта система достигла средней общей точности 98% при времени прогнозирования местности 2,3 с.
В конечном итоге цель этой работы состояла в том, чтобы использовать эти прогнозы для корректировки априорных вероятностей системы распознавания намерений для протеза.Реализация и предварительные испытания этой системы, описанные в [88], были основаны на аналогичных методах и с использованием тех же самых модальностей сенсора, что и в [87], с IMU и лазерным дальномером, расположенными сбоку на талии. ЭМГ-сигналы от сил реакции нижней конечности и опоры, а также сигналы крутящего момента от тензодатчика с 6 степенями свободы использовались для обучения классификатора двигательной активности LDA. Затем априорные вероятности каждого действия были скорректированы с использованием грубых и уточненных модулей распознавания местности.Априорные вероятности были определены по-разному для стационарного и переходного этапов. Для тестирования интегрированной системы были привлечены шесть здоровых и один человек с ампутированной конечностью. Сначала распознавание местности было протестировано на здоровых людях, передвигающихся по лабораторной схеме, включающей ходьбу по ровной местности, лестницу и пандус. Точность распознавания местности составила 99% для уточненного вывода и 98,6% для грубого вывода, а время отклика было положительным, что указывает на то, что местность была распознана до критических переходов.Затем два здоровых субъекта и один человек с ампутированной конечностью ходили с коленом с электроприводом по разным местам, а исследователь дистанционно запускал смену активности.
ЭМГ-сигналы от сил реакции нижней конечности и опоры, а также сигналы крутящего момента от тензодатчика с 6 степенями свободы использовались для обучения классификатора двигательной активности LDA. Затем априорные вероятности каждого действия были скорректированы с использованием грубых и уточненных модулей распознавания местности.Априорные вероятности были определены по-разному для стационарного и переходного этапов. Для тестирования интегрированной системы были привлечены шесть здоровых и один человек с ампутированной конечностью. Сначала распознавание местности было протестировано на здоровых людях, передвигающихся по лабораторной схеме, включающей ходьбу по ровной местности, лестницу и пандус. Точность распознавания местности составила 99% для уточненного вывода и 98,6% для грубого вывода, а время отклика было положительным, что указывает на то, что местность была распознана до критических переходов.Затем два здоровых субъекта и один человек с ампутированной конечностью ходили с коленом с электроприводом по разным местам, а исследователь дистанционно запускал смену активности. Желаемая активность была классифицирована с использованием информации телецептивного датчика и без нее, и было обнаружено, что точность классификации улучшилась со средней точностью 95% при включении грубых или уточненных данных распознавания местности. Наконец, человек с ампутированной конечностью ходил в неструктурированной среде с онлайн-системой принятия решений, и количество ошибок было уменьшено с 57 без какой-либо информации о местности до 21 при использовании грубого вывода и до 11 при использовании уточненного вывода.Эти результаты были многообещающими, хотя необходима дополнительная клиническая оценка.
Желаемая активность была классифицирована с использованием информации телецептивного датчика и без нее, и было обнаружено, что точность классификации улучшилась со средней точностью 95% при включении грубых или уточненных данных распознавания местности. Наконец, человек с ампутированной конечностью ходил в неструктурированной среде с онлайн-системой принятия решений, и количество ошибок было уменьшено с 57 без какой-либо информации о местности до 21 при использовании грубого вывода и до 11 при использовании уточненного вывода.Эти результаты были многообещающими, хотя необходима дополнительная клиническая оценка.
В подходе, аналогичном представленному в [87], Carvalho, et al. [89] использовали лазерный датчик расстояния для оценки перемещений. Для определения пороговых значений для трехуровневого дерева решений, которое было разработано для определения ровной поверхности, пандусов или лестниц, использовалась динамическая калибровка для конкретного объекта. Это дерево решений использовалось для эвристической классификации раздвижных окон как заданной активности передвижения. Система была проверена на 10 здоровых испытуемых, идущих по ряду ландшафтов, в то время как оценщик пометил каждый из 400 общих перемещений. Средняя точность прогноза 92,2% могла быть затронута плохой оценкой лазерного расстояния из-за отражающих поверхностей. Среднее время прогнозирования составляло 1,99 с до фактического перехода движения, что подчеркивает возможность получения предварительных прогнозов значительно заранее с использованием телецепи. В конечном итоге, цель этой работы — включить прогнозирование передвижения в общую систему прямого прогнозирования как априорную вероятность, как описано в [88].
Система была проверена на 10 здоровых испытуемых, идущих по ряду ландшафтов, в то время как оценщик пометил каждый из 400 общих перемещений. Средняя точность прогноза 92,2% могла быть затронута плохой оценкой лазерного расстояния из-за отражающих поверхностей. Среднее время прогнозирования составляло 1,99 с до фактического перехода движения, что подчеркивает возможность получения предварительных прогнозов значительно заранее с использованием телецепи. В конечном итоге, цель этой работы — включить прогнозирование передвижения в общую систему прямого прогнозирования как априорную вероятность, как описано в [88].
Первая попытка использования трехмерных данных для прогнозирования активности походки для протезов с приводом (как средство извлечения дополнительной информации из окружающей среды, чем та, которая предоставляется одиночным лазерным дальномером) была представлена в [90]. Эта работа основана на предыдущем 2D прогнозе активности, предложенном в [91]. В данном случае использовался RGB-D-датчик структурированного света Microsoft Kinect v1. Поскольку стандартный метод определения местоположения лестницы на основе данных трехмерного облака точек отсутствовал, а предложенные методы не были разработаны для оценки намерений пользователя, был предложен новый алгоритм сегментации для определения местоположения лестниц в окружающей среде.Этот алгоритм также создал ряд вторичных функций, которые можно использовать для оценки намерений пользователя, включая расстояние от пользователя до лестницы, угол подхода, глубину шага, высоту шага и количество шагов. Алгоритм обзора был протестирован в нескольких автономных условиях, в том числе в разных положениях и с разными лестницами, и результаты показали, что вычисленное расстояние до лестницы хорошо коррелировало с измеренным расстоянием, средний угол подхода был оценен в пределах 1 ° от измеренного угла, и общие ошибки расстояния были порядка 5 см.Наконец, был проведен онлайн-тест ходьбы с одним здоровым субъектом, идущим по ровной поверхности и по лестнице, с предварительными прогнозами ходьбы по ровной поверхности или подъема по лестнице, произведенными в реальном времени со скоростью 5,15 кадра в секунду (кадров в секунду).
Поскольку стандартный метод определения местоположения лестницы на основе данных трехмерного облака точек отсутствовал, а предложенные методы не были разработаны для оценки намерений пользователя, был предложен новый алгоритм сегментации для определения местоположения лестниц в окружающей среде.Этот алгоритм также создал ряд вторичных функций, которые можно использовать для оценки намерений пользователя, включая расстояние от пользователя до лестницы, угол подхода, глубину шага, высоту шага и количество шагов. Алгоритм обзора был протестирован в нескольких автономных условиях, в том числе в разных положениях и с разными лестницами, и результаты показали, что вычисленное расстояние до лестницы хорошо коррелировало с измеренным расстоянием, средний угол подхода был оценен в пределах 1 ° от измеренного угла, и общие ошибки расстояния были порядка 5 см.Наконец, был проведен онлайн-тест ходьбы с одним здоровым субъектом, идущим по ровной поверхности и по лестнице, с предварительными прогнозами ходьбы по ровной поверхности или подъема по лестнице, произведенными в реальном времени со скоростью 5,15 кадра в секунду (кадров в секунду). Точный прогноз был получен в 98,8% протестированных кадров, и 100% сделанных шагов были точно предсказаны. С тех пор алгоритм был расширен, чтобы включить ходьбу по пандусу и спуск по лестнице, а также использовать небольшой портативный датчик глубины [21] с присоединенным IMU для оценки ориентации датчика глубины [92].
Точный прогноз был получен в 98,8% протестированных кадров, и 100% сделанных шагов были точно предсказаны. С тех пор алгоритм был расширен, чтобы включить ходьбу по пандусу и спуск по лестнице, а также использовать небольшой портативный датчик глубины [21] с присоединенным IMU для оценки ориентации датчика глубины [92].
Эта ранняя работа привела к увеличению количества публикаций, описывающих методы прямого прогнозирования для протезов ног или экзоскелетов с использованием телецептивного зондирования, в основном с использованием светодиодных / лазерных датчиков глубины, хотя использовались и другие подходы. Например, Чжао и др. [93] описывают алгоритм, специально разработанный для определения восходящей лестницы в окружающей среде с использованием Kinect v2 и IMU для получения геометрических параметров. Первая горизонтальная и вертикальная плоскости идентифицируются с использованием процедуры оценки вектора нормали.Затем, рассматривая пересечение горизонтальной и вертикальной плоскостей, алгоритм определяет лестницу и вычисляет количество шагов, горизонтальное и вертикальное расстояние до ступеньки, высоту ступеньки и глубину ступени.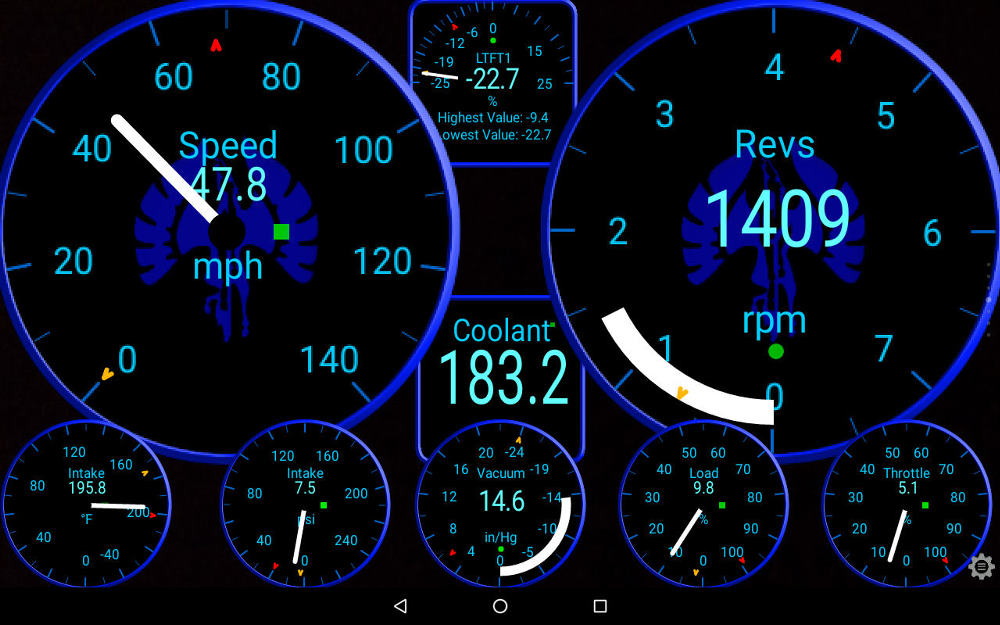 Этот подход очень похож на тот, что описан в [90], хотя в этой работе плоские поверхности были идентифицированы с помощью RANSAC [94]. Было собрано два набора данных, в которых испытуемые ходили по разным лестницам, а Kinect был привязан к их талии. Общее время обработки двух наборов данных составляло 18 мс на фрейм данных.Авторы предлагают использовать этот алгоритм для прогнозирования вперед в экзоскелете нижних конечностей.
Этот подход очень похож на тот, что описан в [90], хотя в этой работе плоские поверхности были идентифицированы с помощью RANSAC [94]. Было собрано два набора данных, в которых испытуемые ходили по разным лестницам, а Kinect был привязан к их талии. Общее время обработки двух наборов данных составляло 18 мс на фрейм данных.Авторы предлагают использовать этот алгоритм для прогнозирования вперед в экзоскелете нижних конечностей.
Несколько иной подход представлен в [95], в котором датчик глубины использовался для определения местности и двигательной активности без IMU. Края лестницы были идентифицированы из облаков точек глубины с использованием преобразования линии Хафа, а край был идентифицирован как принадлежащий лестнице с использованием изменения значений глубины и углового изменения поверхностей по обе стороны от края. После того, как были обнаружены края лестницы, был разработан конечный автомат для определения конкретной двигательной активности, такой как стояние, ходьба по ровной поверхности, подъем по лестнице или спуск по лестнице. Система, протестированная на 9 здоровых испытуемых, которые ходят по кругу из разных местностей, предсказала желаемую стационарную активность с точностью 100% и переходные события с точностью 82%. В будущем авторы планируют проверить этот подход в реальном времени с помощью экзоскелета.
Система, протестированная на 9 здоровых испытуемых, которые ходят по кругу из разных местностей, предсказала желаемую стационарную активность с точностью 100% и переходные события с точностью 82%. В будущем авторы планируют проверить этот подход в реальном времени с помощью экзоскелета.
В отличие от ранее обсужденных телецептивных сенсорных систем, Kleiner et al. [96] предложили использовать радар, а не источники света или лазера для прогнозирования вперед, чтобы уменьшить влияние одежды или окклюзии на производительность.Радиолокационный датчик непрерывной волны с частотной модуляцией (FMCW) был прикреплен к протезу голеностопного сустава BiOM [2], вместе с IMU для идентификации событий походки, а система захвата движения и сенсорная стелька были использованы для получения достоверной информации о двигательной активности для сравнения с предсказаниями радара. Затем наличие и высота лестницы можно было бы определить с помощью сигнала радара, который требует обработки, поскольку радар обеспечивает измерение отражения, возвращаемого сканеру, а не фактического расстояния (как обеспечивается датчиком ToF), а сигнал является функцией радиального расстояния до объекта. Этот радиус варьируется в зависимости от размера, геометрии, материала поверхности и т. Д., Поэтому для получения точной высоты отраженной лестницы необходимо сделать некоторые предположения. В конечном итоге приблизительное значение высоты объектов в окружающей среде может быть вычислено, хотя понимание того, как различные ландшафты влияют на отраженное радиолокационное сканирование и насколько хорошо это может использоваться для прогнозирования вперед, требует дополнительных исследований.
Этот радиус варьируется в зависимости от размера, геометрии, материала поверхности и т. Д., Поэтому для получения точной высоты отраженной лестницы необходимо сделать некоторые предположения. В конечном итоге приблизительное значение высоты объектов в окружающей среде может быть вычислено, хотя понимание того, как различные ландшафты влияют на отраженное радиолокационное сканирование и насколько хорошо это может использоваться для прогнозирования вперед, требует дополнительных исследований.
г. Подходы к машинному обучению
Varol et al. протестировал датчик RGB-D, который носили на хвостовике и ориентировали на землю [97].Один трудоспособный субъект ходил в естественной среде с различными условиями освещения, и были отмечены пять режимов активности. Разница в глубине между двумя кадрами использовалась для предоставления контекста о движении окружающей среды относительно пользователя. Затем статистические характеристики были извлечены из областей интереса 4 разных размеров и использованы для обучения классификатора SVM с помощью 5-кратной перекрестной проверки. Для прогнозирования использовалась модель SVM с наивысшей точностью, а для повышения стабильности прогнозирования применялся фильтр большинства голосов.Предварительные результаты продемонстрировали хорошую производительность с точностью 99% активности и единственной ошибкой прогнозирования перехода.
Для прогнозирования использовалась модель SVM с наивысшей точностью, а для повышения стабильности прогнозирования применялся фильтр большинства голосов.Предварительные результаты продемонстрировали хорошую производительность с точностью 99% активности и единственной ошибкой прогнозирования перехода.
Система, представленная в [97], была немного изменена и подтверждена еще 12 участниками в [98]. Как и в [97], испытуемые ходили по нескольким разным местам, используя камеру RGB-D, прикрепленную под углом, на правой стойке, и камеру RGB, прикрепленную к груди для маркировки кадров. Статистические функции были стандартизированы до уменьшения размерности, обучения SVM и голосования большинством.Было проведено сравнение нескольких стратегий уменьшения размерности и SVM, и лучшая точность была получена при использовании кубического ядра SVM без уменьшения размерности. Однако это также привело к максимальному времени вычислений. Эта стратегия была выбрана для оптимизации производительности, но, возможно, привела к задержкам в системе. Была получена средняя частота ошибок в установившемся состоянии 0,75% и частота ошибок перехода 6% при средней задержке распознавания 0,33 с. Обучение классификатора SVM с использованием 8 предметов, а затем тестирование с использованием оставшихся 4 предметов привело к средней точности классификации 94.5%. Однако у 10% правильно классифицированных переходов задержка предсказания превышала 0,5 с. Хотя эти предварительные результаты продемонстрировали потенциальную возможность обобщения телецептивного зондирования для прямого прогнозирования, при интеграции в вспомогательный робот потребуются более высокая точность прогнозирования и меньшая задержка прогнозирования, чтобы избежать спотыкания или падений.
Была получена средняя частота ошибок в установившемся состоянии 0,75% и частота ошибок перехода 6% при средней задержке распознавания 0,33 с. Обучение классификатора SVM с использованием 8 предметов, а затем тестирование с использованием оставшихся 4 предметов привело к средней точности классификации 94.5%. Однако у 10% правильно классифицированных переходов задержка предсказания превышала 0,5 с. Хотя эти предварительные результаты продемонстрировали потенциальную возможность обобщения телецептивного зондирования для прямого прогнозирования, при интеграции в вспомогательный робот потребуются более высокая точность прогнозирования и меньшая задержка прогнозирования, чтобы избежать спотыкания или падений.
С момента внедрения глубокого обучения, в частности CNN, в область компьютерного зрения, несколько групп представили подходы к решению задачи прямого прогнозирования с использованием CNN, обученной на данных телецептивных датчиков.Например, Laschowski, et al. [99] представили подход, основанный на CNN, в котором камера RGB была прикреплена к груди, в то время как субъект ходил в различных средах и условиях освещения, а изображения были получены со скоростью 60 кадров в секунду. Миллионы изображений были получены в течение 10 часов ходьбы, и часть изображений, полученных во время эксперимента, была помечена экспериментатором как ходьба по ровной поверхности, подъем по лестнице или спуск по лестнице. Затем была обучена 10-уровневая CNN с пространственным объединением и объединением на основе шага, и была реализована 5-кратная перекрестная проверка.Общая точность классификации составила 94,9%, при этом наименьшая точность при спуске по лестнице составила 87,3%, хотя это может быть связано с дисбалансом изображений для каждого класса и частично из-за ложноотрицательных результатов.
Миллионы изображений были получены в течение 10 часов ходьбы, и часть изображений, полученных во время эксперимента, была помечена экспериментатором как ходьба по ровной поверхности, подъем по лестнице или спуск по лестнице. Затем была обучена 10-уровневая CNN с пространственным объединением и объединением на основе шага, и была реализована 5-кратная перекрестная проверка.Общая точность классификации составила 94,9%, при этом наименьшая точность при спуске по лестнице составила 87,3%, хотя это может быть связано с дисбалансом изображений для каждого класса и частично из-за ложноотрицательных результатов.
Аналогичным образом, Novo Torres et al. [100] использовали детектор препятствий на основе CNN, созданного с использованием изображений камеры RGB, полученных в течение 7 часов ходьбы. Изображения были помечены как содержащие препятствие или нет, и разделены на наборы для проверки и обучения. Точность обучения для CNN составила 98.7%, а точность проверки составила 95%. Однако изображения из невидимого испытания дали общую точность предсказания препятствий 89%. В будущем авторы планируют включить другие датчики, такие как IMU, и внедрить эту систему на протезе ноги.
В будущем авторы планируют включить другие датчики, такие как IMU, и внедрить эту систему на протезе ноги.
Khademi, et al. [101] также представили результаты использования CNN с изображениями RGB. В их реализации IMU на бедре использовался для запуска камеры, прикрепленной к талии. Передаточное обучение с использованием предварительно обученной модели VGG-16 [102] использовалось для обучения CNN вычислительно эффективным способом, а наборы данных для обучения и проверки дали точность> 99%.CNN была обучена предсказывать ходьбу по ровной поверхности, подъем по лестнице или спуск по лестнице, и точность прогнозов составляла в среднем 99% для стационарного передвижения и 90% для переходных шагов. Включение истории прогнозов повысило точность перехода за счет учета количества ступенек на лестнице. После включения этой информации общая точность для всех шагов составила 99%. В конечном итоге авторы намереваются использовать изображения глубины, а не только изображения RGB, для оптимизации производительности.
Zhang et al.[103] представили результаты управляемого CNN детектора местности, который использовал облака точек на основе глубины, а не только изображения RGB. Датчик глубины и IMU были привязаны к бедру во время испытаний ходьбы в помещении и на открытом воздухе с 6 здоровыми субъектами и 3 инвалидами. В этом подходе трехмерные облака точек были уменьшены в размерах, так что только проекция x-z (или вид сбоку) была извлечена и сохранена как двоичное изображение, из которого можно было извлекать функции для обучения или тестирования с помощью глубокой CNN. Из этого двоичного изображения RANSAC [94] использовался для подгонки линий к краям местности.Смоделированные бинарные изображения использовались для проверки распознавания местности и достигли 100% точности. Затем для проверки общей производительности системы были использованы пробные обходы в различных средах, и была достигнута точность 95% при среднем времени обработки каждого кадра 3 мс, хотя это не тестировалось на встроенной системе. Кроме того, были оценены экологические характеристики, включая высоту и ширину лестниц и уклоны пандусов, для будущей интеграции в контроллер среднего уровня для конкретных видов деятельности.
Кроме того, были оценены экологические характеристики, включая высоту и ширину лестниц и уклоны пандусов, для будущей интеграции в контроллер среднего уровня для конкретных видов деятельности.
Результаты подходов на основе CNN многообещающие; однако в настоящее время реализация классификатора с глубоким обучением требует больших вычислительных ресурсов и еще не тестировалась со встроенной системой. Возможно, пройдет какое-то время, прежде чем станет реалистичным использование глубокого обучения во встроенной системе прогнозирования в реальном времени для носимого роботизированного устройства.
Krausz et al. [104] использовали подход машинного обучения для сравнения телецептивного измерения глубины ToF с приближенным зондированием с использованием IMU, гониометров и ЭМГ для прогнозирования желаемой двигательной активности.Некоторые глубинные характеристики были извлечены из облаков точек, полученных во время прохождения здорового человека по разным местам. Характеристики были нормализованы и уменьшены в размерах с помощью LDA, а затем оценена изменчивость, повторяемость и разделимость этих функций по сравнению с характеристиками IMU, гониометра и ЭМГ, которые обычно используются для прогнозирования активности для протезов нижних конечностей с электроприводом. Характеристики, основанные на глубине, имели низкую вариабельность внутри субъекта и внутри деятельности, между разделимостью действий и повторяемостью между субъектами, таким образом, путем комбинирования глубинных характеристик с другими близкими типами признаков улучшилась общая повторяемость между субъектами и разделимость между действиями.Эти результаты могут позволить разработать контроллер, который можно было бы обобщить для разных предметов и различных видов деятельности. У человека с трансфеморальной ампутацией, ходящего на протезе ноги с электроприводом, Krausz et al. (на рассмотрении) [105] обнаружил, что этот автономный контроллер, сочетающий в себе методы телецепции и непосредственного сенсора, был лучше, чем контроллер, не включающий телецепцию.
Характеристики, основанные на глубине, имели низкую вариабельность внутри субъекта и внутри деятельности, между разделимостью действий и повторяемостью между субъектами, таким образом, путем комбинирования глубинных характеристик с другими близкими типами признаков улучшилась общая повторяемость между субъектами и разделимость между действиями.Эти результаты могут позволить разработать контроллер, который можно было бы обобщить для разных предметов и различных видов деятельности. У человека с трансфеморальной ампутацией, ходящего на протезе ноги с электроприводом, Krausz et al. (на рассмотрении) [105] обнаружил, что этот автономный контроллер, сочетающий в себе методы телецепции и непосредственного сенсора, был лучше, чем контроллер, не включающий телецепцию.
Страница не найдена | MIT
Перейти к содержанию ↓- Образование
- Исследование
- Инновации
- Прием + помощь
- Студенческая жизнь
- Новости
- Выпускников
- О MIT
- Подробнее ↓
- Прием + помощь
- Студенческая жизнь
- Новости
- Выпускников
- О MIT
Попробуйте поискать что-нибудь еще! Что вы ищете? Увидеть больше результатов
Предложения или отзывы?
% PDF-1. 3
%
632 0 объект>
endobj
xref
632 147
0000000016 00000 н.
0000005236 00000 п.
0000005439 00000 п.
0000003236 00000 н.
0000005482 00000 н.
0000005615 00000 н.
0000005759 00000 п.
0000006389 00000 п.
0000006425 00000 н.
0000006754 00000 н.
0000007108 00000 н.
0000016592 00000 п.
0000017064 00000 п.
0000017141 00000 п.
0000017574 00000 п.
0000020244 00000 п.
0000027977 00000 н.
0000028048 00000 п.
0000028123 00000 п.
0000028207 00000 п.
0000028378 00000 п.
0000028421 00000 п.
0000028510 00000 п.
0000028588 00000 п.
0000028682 00000 п.
0000028725 00000 п.
0000028858 00000 п.
0000028901 00000 п.
0000028983 00000 п.
0000029055 00000 п.
0000029187 00000 п.
0000029230 00000 п.
0000029312 00000 п.
0000029384 00000 п.
0000029518 00000 п.
0000029561 00000 п.
0000029643 00000 п.
0000029715 00000 п.
0000029847 00000 п.
0000029890 00000 н.
0000029972 00000 н.
0000030044 00000 п.
0000030175 00000 п.
0000030218 00000 п.
0000030300 00000 п.
0000030372 00000 п.
3
%
632 0 объект>
endobj
xref
632 147
0000000016 00000 н.
0000005236 00000 п.
0000005439 00000 п.
0000003236 00000 н.
0000005482 00000 н.
0000005615 00000 н.
0000005759 00000 п.
0000006389 00000 п.
0000006425 00000 н.
0000006754 00000 н.
0000007108 00000 н.
0000016592 00000 п.
0000017064 00000 п.
0000017141 00000 п.
0000017574 00000 п.
0000020244 00000 п.
0000027977 00000 н.
0000028048 00000 п.
0000028123 00000 п.
0000028207 00000 п.
0000028378 00000 п.
0000028421 00000 п.
0000028510 00000 п.
0000028588 00000 п.
0000028682 00000 п.
0000028725 00000 п.
0000028858 00000 п.
0000028901 00000 п.
0000028983 00000 п.
0000029055 00000 п.
0000029187 00000 п.
0000029230 00000 п.
0000029312 00000 п.
0000029384 00000 п.
0000029518 00000 п.
0000029561 00000 п.
0000029643 00000 п.
0000029715 00000 п.
0000029847 00000 п.
0000029890 00000 н.
0000029972 00000 н.
0000030044 00000 п.
0000030175 00000 п.
0000030218 00000 п.
0000030300 00000 п.
0000030372 00000 п. 0000030505 00000 п.
0000030548 00000 п.
0000030630 00000 п.
0000030702 00000 п.
0000030876 00000 п.
0000030918 00000 п.
0000031007 00000 п.
0000031079 00000 п.
0000031171 00000 п.
0000031213 00000 п.
0000031313 00000 п.
0000031355 00000 п.
0000031446 00000 п.
0000031488 00000 п.
0000031529 00000 п.
0000031623 00000 п.
0000031665 00000 п.
0000031767 00000 п.
0000031809 00000 п.
0000031851 00000 п.
0000031893 00000 п.
0000031987 00000 п.
0000032030 00000 п.
0000032156 00000 п.
0000032199 00000 п.
0000032318 00000 п.
0000032361 00000 п.
0000032500 00000 н.
0000032543 00000 п.
0000032657 00000 п.
0000032699 00000 н.
0000032827 00000 н.
0000032869 00000 п.
0000032911 00000 п.
0000032953 00000 п.
0000033109 00000 п.
0000033152 00000 п.
0000033246 00000 п.
0000033289 00000 п.
0000033432 00000 п.
0000033475 00000 п.
0000033592 00000 п.
0000033635 00000 п.
0000033750 00000 п.
0000033793 00000 п.
0000033836 00000 п.
0000033879 00000 п.
0000033985 00000 п.
0000030505 00000 п.
0000030548 00000 п.
0000030630 00000 п.
0000030702 00000 п.
0000030876 00000 п.
0000030918 00000 п.
0000031007 00000 п.
0000031079 00000 п.
0000031171 00000 п.
0000031213 00000 п.
0000031313 00000 п.
0000031355 00000 п.
0000031446 00000 п.
0000031488 00000 п.
0000031529 00000 п.
0000031623 00000 п.
0000031665 00000 п.
0000031767 00000 п.
0000031809 00000 п.
0000031851 00000 п.
0000031893 00000 п.
0000031987 00000 п.
0000032030 00000 п.
0000032156 00000 п.
0000032199 00000 п.
0000032318 00000 п.
0000032361 00000 п.
0000032500 00000 н.
0000032543 00000 п.
0000032657 00000 п.
0000032699 00000 н.
0000032827 00000 н.
0000032869 00000 п.
0000032911 00000 п.
0000032953 00000 п.
0000033109 00000 п.
0000033152 00000 п.
0000033246 00000 п.
0000033289 00000 п.
0000033432 00000 п.
0000033475 00000 п.
0000033592 00000 п.
0000033635 00000 п.
0000033750 00000 п.
0000033793 00000 п.
0000033836 00000 п.
0000033879 00000 п.
0000033985 00000 п.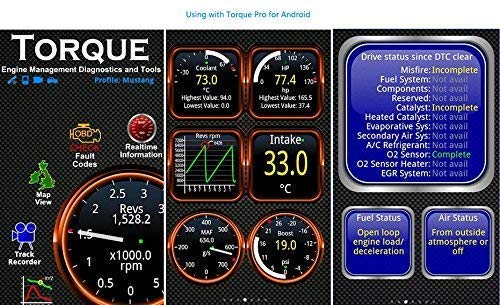 0000034028 00000 п.
0000034155 00000 п.
0000034198 00000 п.
0000034326 00000 п.
0000034369 00000 п.
0000034488 00000 п.
0000034531 00000 п.
0000034662 00000 п.
0000034705 00000 п.
0000034748 00000 п.
0000034791 00000 п.
0000034885 00000 п.
0000034928 00000 п.
0000035101 00000 п.
0000035144 00000 п.
0000035269 00000 п.
0000035312 00000 п.
0000035464 00000 п.
0000035507 00000 п.
0000035625 00000 п.
0000035668 00000 п.
0000035711 00000 п.
0000035754 00000 п.
0000035848 00000 п.
0000035891 00000 п.
0000036033 00000 п.
0000036076 00000 п.
0000036191 00000 п.
0000036234 00000 п.
0000036332 00000 п.
0000036375 00000 п.
0000036488 00000 п.
0000036531 00000 п.
0000036574 00000 п.
0000036617 00000 п.
0000036736 00000 п.
0000036779 00000 п.
0000036873 00000 п.
0000036916 00000 п.
0000037050 00000 п.
0000037093 00000 п.
0000037221 00000 п.
0000037264 00000 п.
0000037377 00000 п.
0000037420 00000 п.
0000037463 00000 п.
0000037506 00000 п.
0000037607 00000 п.
0000034028 00000 п.
0000034155 00000 п.
0000034198 00000 п.
0000034326 00000 п.
0000034369 00000 п.
0000034488 00000 п.
0000034531 00000 п.
0000034662 00000 п.
0000034705 00000 п.
0000034748 00000 п.
0000034791 00000 п.
0000034885 00000 п.
0000034928 00000 п.
0000035101 00000 п.
0000035144 00000 п.
0000035269 00000 п.
0000035312 00000 п.
0000035464 00000 п.
0000035507 00000 п.
0000035625 00000 п.
0000035668 00000 п.
0000035711 00000 п.
0000035754 00000 п.
0000035848 00000 п.
0000035891 00000 п.
0000036033 00000 п.
0000036076 00000 п.
0000036191 00000 п.
0000036234 00000 п.
0000036332 00000 п.
0000036375 00000 п.
0000036488 00000 п.
0000036531 00000 п.
0000036574 00000 п.
0000036617 00000 п.
0000036736 00000 п.
0000036779 00000 п.
0000036873 00000 п.
0000036916 00000 п.
0000037050 00000 п.
0000037093 00000 п.
0000037221 00000 п.
0000037264 00000 п.
0000037377 00000 п.
0000037420 00000 п.
0000037463 00000 п.
0000037506 00000 п.
0000037607 00000 п. 0000037650 00000 п.
0000037793 00000 п.
0000037836 00000 п.
0000037879 00000 п.
0000037922 00000 п.
трейлер
] >>
startxref
0
%% EOF
635 0 obj> поток
xX pU hд6
🙂 tT ܤ KIkMrŖA, h8CM (z -u * U ܌ NTQu @ qF ~ ㌣3 / ni ߙ L} |? m
0000037650 00000 п.
0000037793 00000 п.
0000037836 00000 п.
0000037879 00000 п.
0000037922 00000 п.
трейлер
] >>
startxref
0
%% EOF
635 0 obj> поток
xX pU hд6
🙂 tT ܤ KIkMrŖA, h8CM (z -u * U ܌ NTQu @ qF ~ ㌣3 / ni ߙ L} |? m
| ||
| ||
| ||
| ||
| ||
|


 Это дилерская машина, и все, что нужно делать по дешевке.
Это дилерская машина, и все, что нужно делать по дешевке. 


(PDF) Сравнение влияния обучения экологическому вождению и простых советов на поведение вождения
216 Cindie Andrieu et al./ Процедуры — Социальные и поведенческие науки 54 (2012) 211 — 220
Целью этого исследования является оценка эффекта каждого совета по вождению после двух режимов обучения: один с испытуемыми
, следуя простым советам по эко-вождению (эксперимент 1) , а другой — с обучением экологическому вождению (эксперимент 2). Наш подход
заключается в построении для каждого эксперимента прогностической модели вероятности оказаться в ситуации экологического вождения
с использованием модели биномиальной логистической регрессии с четырьмя показателями в таблице 1 в качестве независимых переменных.
Согласно нашему эксперименту, мы прогнозируем двоичную переменную с именем «Поездка», которая принимает значение 0 при нормальном вождении
(обозначено как «нормальное») и 1 при эко-вождении (обозначено как «эко»). Таким образом, значимость различий каждого показателя
между обычным и эко-вождением позволяет нам оценить, какие рекомендации практически используются водителями
в зависимости от того, как они научились эко-вождению.
Однако в наших двух экспериментах как количество кластеров (20 в эксперименте 1 и 19 в эксперименте
), так и размер кластера (2 в двух экспериментах) малы, что подразумевает различные ограничения.В первой части
небольшой размер нашей выборки ограничивает количество предикторов, для которых можно точно оценить эффекты
. Peduzzi et al. (1996) предполагает, что в идеале должно быть не менее десяти исходов каждого типа для каждого предиктора
. Этот результат вынуждает нас оценивать влияние каждого совета по вождению отдельно и, следовательно,
построить одну модель логистической регрессии с каждым из четырех показателей в качестве предиктора.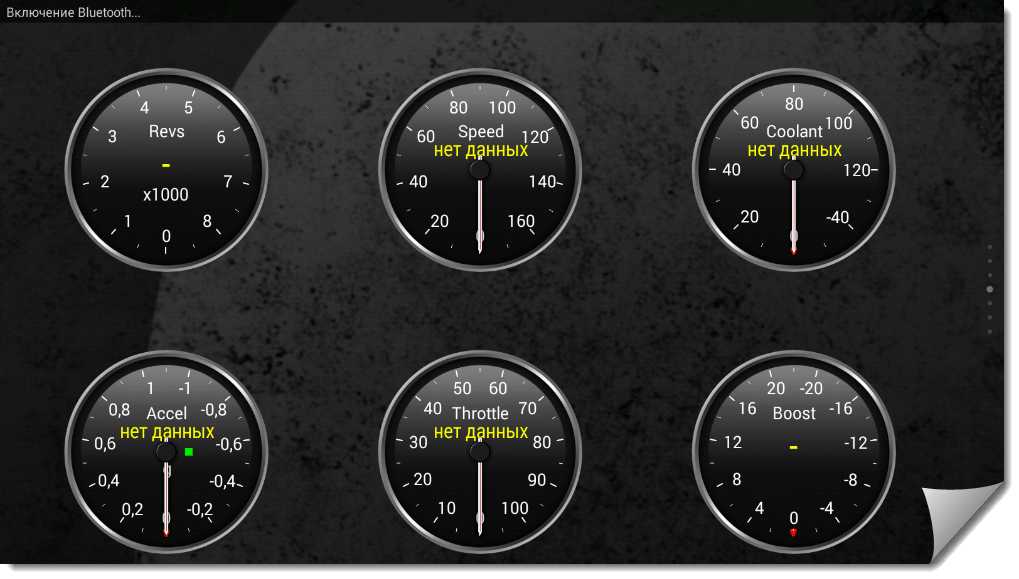 Во второй части, малость
Во второй части, малость
размера нашей выборки не позволяет нам использовать соответствующие статистические модели с учетом специфических корреляций драйвера
.Действительно, мы протестировали метод GEE с помощью PROC GENMOD программного обеспечения SAS, но оценки
параметровбыли близки к нулю. Ziegler et al. (1998) рекомендуют применение GEE только в том случае, если количество кластеров
составляет не менее 30 для размера кластера около 4 для корреляции от низкой до умеренной. Мы также протестировали обобщенные линейные смешанные модели
с использованием PROC GLIMMIX SAS, но в заявлении указано, что один из оцененных параметров дисперсии
был отрицательным.Этот результат является недооценкой истинной составляющей дисперсии, которая возникает, когда число наблюдений на каждую категорию случайных эффектов мало или когда отношение истинной составляющей дисперсии
к остатку мало. Более того, в нескольких исследованиях (Moineddin (2007), Theall (2011)) было показано, что
оценок параметров несмещены с помощью логистических моделей с фиксированными или случайными эффектами, когда количество кластеров
и размер кластера малы. Однако эти исследования показывают, что оценки случайного пересечения
Однако эти исследования показывают, что оценки случайного пересечения
и случайного наклона имеют большие смещения по сравнению с параметрами фиксированного эффекта.Таким образом, далее в этой статье,
мы используем обычную логистическую регрессию.
Логистическая модель может быть записана как:
ܮ݃݅ ݐ ሾ ܲ ሺ ܶݎ݅ ൌ ܧܿ ሻሿ ߙ ߚ ܺ
где α — точка пересечения, X — один из четырех индикаторов, связанных с основными правилами экологичного вождения (Таблица 1 )
, а β — оценка параметра предиктора X. Результаты каждой логистической модели перечислены в таблице 3 для
эксперимента 1 и в таблице 4 для эксперимента 2. Для каждой логистической модели мы указываем объясняющую переменную
X, расчетный параметр β, его стандартная ошибка SE и p-значение критерия Вальда.Мы также указываем коэффициенты вероятности
(OR) и их 95% доверительный интервал Вальда. Полезность каждой модели измеряется с помощью Nagelkerke
R², обозначенного ܴ ே
, который является скорректированной версией Cox & Snell R² и аналогичен коэффициенту определения
R² в линейной регрессии. Этот параметр не измеряет степень соответствия модели, но
Этот параметр не измеряет степень соответствия модели, но
указывает, насколько полезна независимая переменная при прогнозировании переменной ответа.Наконец, предсказательная сила
каждой модели измеряется площадью под кривой ROC (AUC). Этот параметр в диапазоне от нуля до единицы и
, идентичный индексу конкордантности, оценивает способность модели к различению. В нашем исследовании он измеряет способность модели
различать поездки с эко-вождением и обычные поездки. Более подробная информация об этих различных параметрах
дана в Agresti (2002) или Hosmer and Lemeshow (2000).
В таблицах 3 и 4 четыре логистические модели, оценивающие реализацию каждого правила эко-вождения, имеют ранжирование
в порядке убывания обоих параметров ܴ ே
ଶ и AUC и, таким образом, представляют собой порядок реализации
.каждый совет по вождению.Таблица 3 показывает, что все показатели значимы (p-значение ниже 0,01 и 95%
доверительный интервал, включая один) в эксперименте 1, но показатели, связанные с первыми тремя правилами, являются
наиболее значимыми: относительно высокими ܴ ே
ଶ отражая, что три индикатора AvgRPMShiftUp, IndexGearRPM и
PKE полезны для прогнозирования поездки в режиме эко-вождения, а AUC больше 0,8, что свидетельствует о высокой дискриминирующей способности
.